First time setting up a fixed wing. Using the matek H743wing with the CAN-Bus gps and airspeed. The plane flys great in FBWA but in FBWB and loiter is seems to be losing altitude. I need to pull up to keep it flying level in loiter but mission planner showed that the plane was gaining altitude when it wasn’t. If I kept it in loiter with no stick input it would lose atitude visually but not in mission planner. At one point I was like 50ft off the ground and MP said I was at over 300ft. Any and all advice is greatly appreciated.
Just a thought, Almost sounds like you’ve got low pressure in your fuselage around your flight controller. Can you open up the airflow around the controller or at least stabilize it?
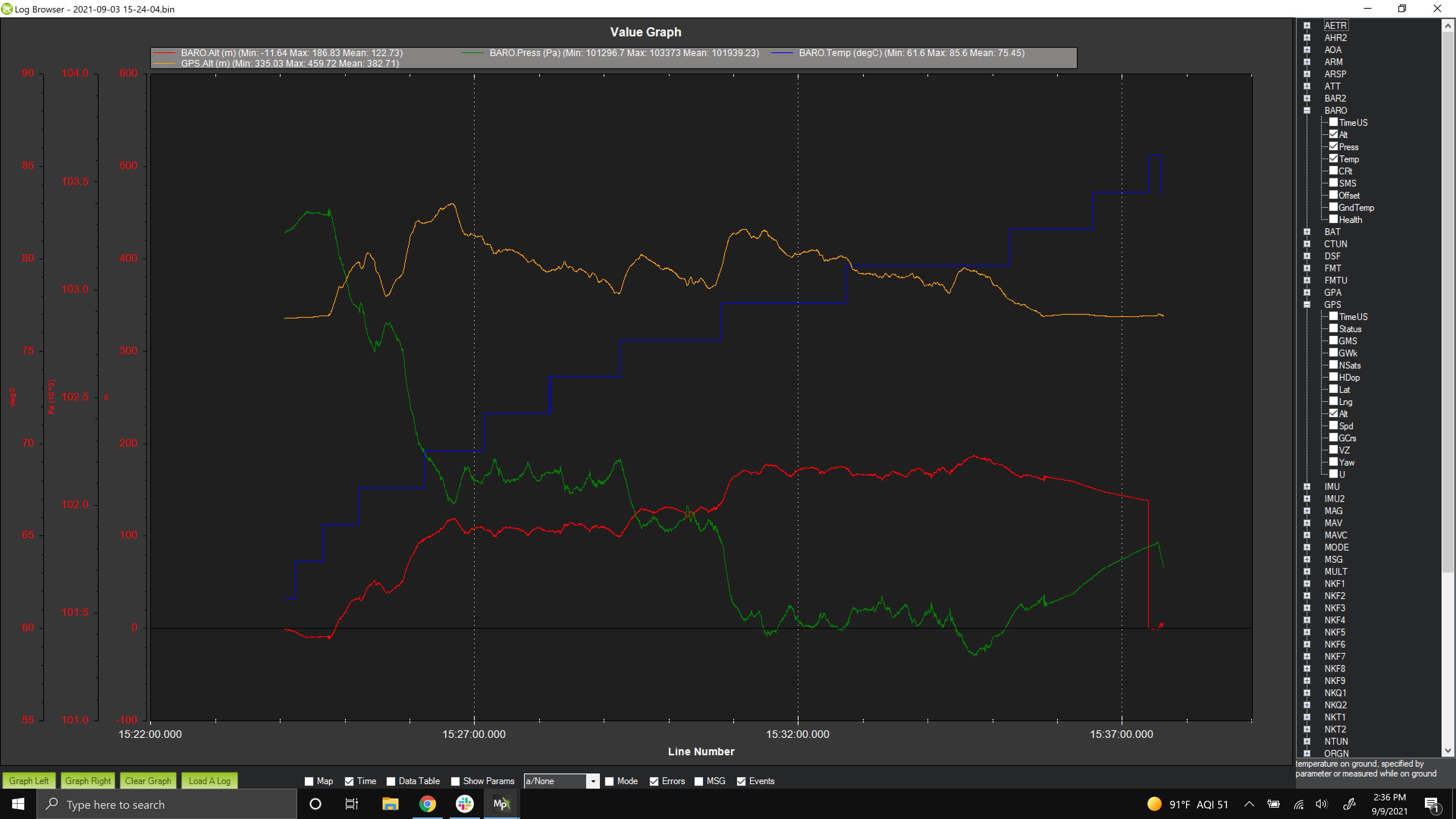
I did this comparision from the log above of the GPS alt and Baro Alt. The Baro inaccuracy increases as the baro temp goes up. Unforunately I dont see any of the parameters for the temp cal for the barometer for the H743. Am I missing something?
After changing AHRS_GPS_USE to 2, so that the FC uses the gps for position and altitude I was able to get it to hold position and even run an auto mission doing an unlimited loiter at about 50m. Here is the same graph. The FC is holding decent altitude with the GPS in the loop. The barometer is not right
Those logs certainly suggest the baro temp is the problem. That temperature in the 70’s seems really high to start with. I just looked at a sample of some of my logs with Matek boards (various 405 boards). My baro temps are usually less than 10 degrees over ambient. I realized there’s lots of variables here, but something to consider. I guess the question is, is the barometer getting hot because it’s got a problem, or is there a problem because it’s getting hot?