I have STM32F103 and CAN transciever, looking for some code that can test/prove that the hardware can communicate with Ardupilot.
You shouldn’t need any proof of concept to show that STM32s are capable of communicating back and forth. What’s the use case? Might as well move straight ahead into something practical.
Thank you for replying.
I’d just like to program something that communicates with ArduPilot on CAN, as an alternative to MAVLink(Serial)
Having some program that shows how-to, would quickly validate the hardware design too:
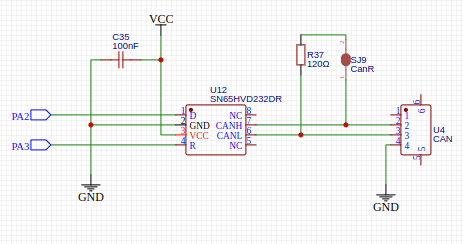
So If I had …“anything” that I could run on the STM32 just to verify that the design to U4 (JST-GH 4P) is ok, that would help a lot.
as long as the STM32 has at least 128k of flash then you could install AP_Periph on it.
MavLink and DroneCAN are different protocols with different purposes.
MavLink is inter vehicle protocol with support for intra vehicle communication to facilitate multiple components on one vehicle communicating both with other modules and GCS.
DroneCAN is strictly intra vehicle with no capabilities to handle multiple vehicles on the same bus (not that it would be possible).
Thank you, I hoped for something leaner, but I might very well do that route. ![]()
Right now I am using STM32F103C8 (64KB) - but may redesign if needed.
Thank you, I am well aware of that - I will need simple configuration options(like parameters) and maybe later some (low rate/volume) logging - so both protocols are feasible for this, and this is why I am looking at both.