The Eachine and Fuav are just relabeled devices. @GregCovey on a Taranis you have two options off the top of my head for telemetry.
The first is the Craft and theory Lula script method providing telemetry to the Taranis direct via an FRsky smart port on the receiver. Advantage is reasonable range but the GUI is rough and not something you can interact with.
The second method is the telemetry modem on the UART port of the Pix based flight controller. This can interface with a phone and allow you to interact via a flight control app like Tower, Mission planner or Qgroundcontrol. The advantage is the interface, the disadvantage is range unless you go to a better telemetry modem.
Skydroid builds the telemetry function into the receiver directly. The advantage is the less airborne hardware, interact via an app and range. The disadvantage is the lack of the custom tweaking you can do in a Taranis. Mixing, switch programming and so on.
The Skydroid system is a dual antenna system and some folk are moving to using two different types of antenna such as directional for improved range. (still only tested to 17km)
@ton999 I can’t tell you if it’s better then other systems. I would have to try them all and well my pockets aren’t that deep. I can tell you that it’s the easiest method to interface video and the Flight control app. However you can get video to UVC converters if you wanted to use your standard receiver and your tablet…but that gets cumbersome. Long cables or repeater stations. As for the receiver system you referenced, sorry I know nothing about it.
@ton999 and welcome to the family. If you have questions please put them out to the community. Also if you need something in the manual let me know. It’s a community effort.
@GregCovey I checked with Cao and the USB is to power your phone. I also got the impression it provides the same data link as the Bluetooth connection. so more then enough juice to run the receiver.
It’s the same thought line I had but figured that the best way I’m going to find out is to actually use it. One concern that I hope is not going to be degraded is the resolution/accuracy/latency of response, especially during the final phases of landing a plane or VTOL. I suppose it’ll soon be answered.
thank you every one some great info there,certainly onwards and upwards I really think we have a winner here and im also looking forward to any enhancements that come out in the future
Thanks for your answers and for checking on things with Cao. I see that SkyDroid sells separate R12L receivers, presumably for multiple models. How many models can be programmed into the M12?
You only have to save params in the tablet with your model name so I hope no limits, only tablet space, then you upload the file that you need looks very easy.
So the binding process to each receiver is generic? If I have a R12 receiver bound in two or three different models, I can select the model via tablet params?
I just buy tree rx so I ask your question too to be shure but I understand like you, you choose the model file in the tablet app and fly, I confirm when get response.
I don’t know the limit of the number of Parameter configs you can store, but it’s a good number.
Keep in mind that all your storing is a basic config that applies to a certain model you have established so that you can recreate the model if needed. You don’t open a config each time you fly. The RC config is stored on the receiver so if that receiver is on and talking to the Link unit the config for said model is what the handheld uses.
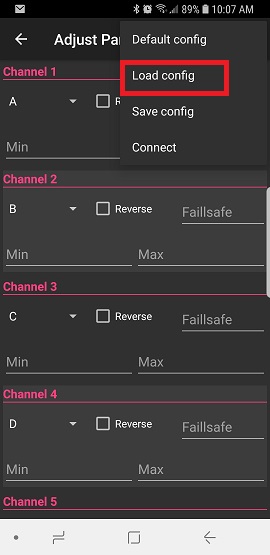
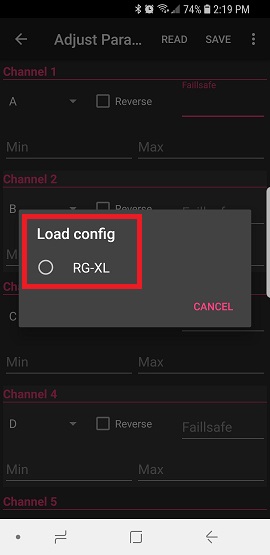
Load a config
The other half of that equation is the parameter listing you have applied to the flight controller via Mission planner or your choice of flight controller config tools.
Binding is generic in that you bind the receiver to the Link handheld…one day I will come up with a description of the handheld unit that rolls off the tongue. Anyway the handheld talks to the receiver if it’s on. It’s not like a Taranis in that you establish a model and bind the model and receiver together.
If the receiver is on it talks to the handheld unit using the configuration you stored on it, you can’t or shouldn’t talk to two at once. I don’t know the affects as I have never tried it but I wouldn’t suggest it.
Here is the binding procedure.It’s pretty easy. Don’t do it when other M12L’s are on as you may have a problem with it picking yours lol.
I myself have three unit’s in play. I confess I tend to run the same config on each receiver with the exception of a large quad I have that uses the channels higher then 8 to run the gimbal where as other drones I have just use 1 to 8 so for me I have two configs, One with gimbal and one with out. All my machines are Arducopter so the config is the same.
As you can see @GregCovey there is a lot of enthusiasm for the unit. If your goign to buy one go in with your eyes open. This isn’t a taranis, it works differently. There is no mixing, there are no 6 position switches, no configurable sounds…the sticks go up and down left and right. The switches are 3 position only. There is nothing fancy about them.
This is a UAV controller or Uplink device not an RC system and it takes some getting use to. The operating paradigm is different, it’s easy to use and easy to get use to, but it’s different.
The sticks are softer and there is little you can do about it. There is no trim. Your making a shift in the way you think and operate a drone. It may not be for everyone.
But for those that have made the leap. Well we all seem to be happy.
So config is storage in receiver? So dont need to upload new config when you change ships? Good.
To allow two switches for six position modes looks a good demand, perhaps in future they can consider? In the way we can use ch 6-7 for other modes but we have to use more channels and in arduplane isnt aviable. Nice description Ricky about differences with a standard radio.
App can import and save parameters, but to ensure that only one aircraft is electrified at the same time, otherwise all aircraft will receive control signals, which is more dangerous.
@ Cala2 and Cao,I think as A lot of the user’s of the M12 use ardupilot a way of being able to use 6 flight modes on a switch or 2 switches would be a great feature also a smaller receiver would be nice but not so important,im still in love with my M12 it is a great system