So, I’m planning to build a 13 inch quad and place esc in the body, the motor wire needs to be at least 25cm.
I was testing iflight 5215 330kv @12s with 13103 prop. ESC is flycolor HV3PRO 12s 80a with blheli32.
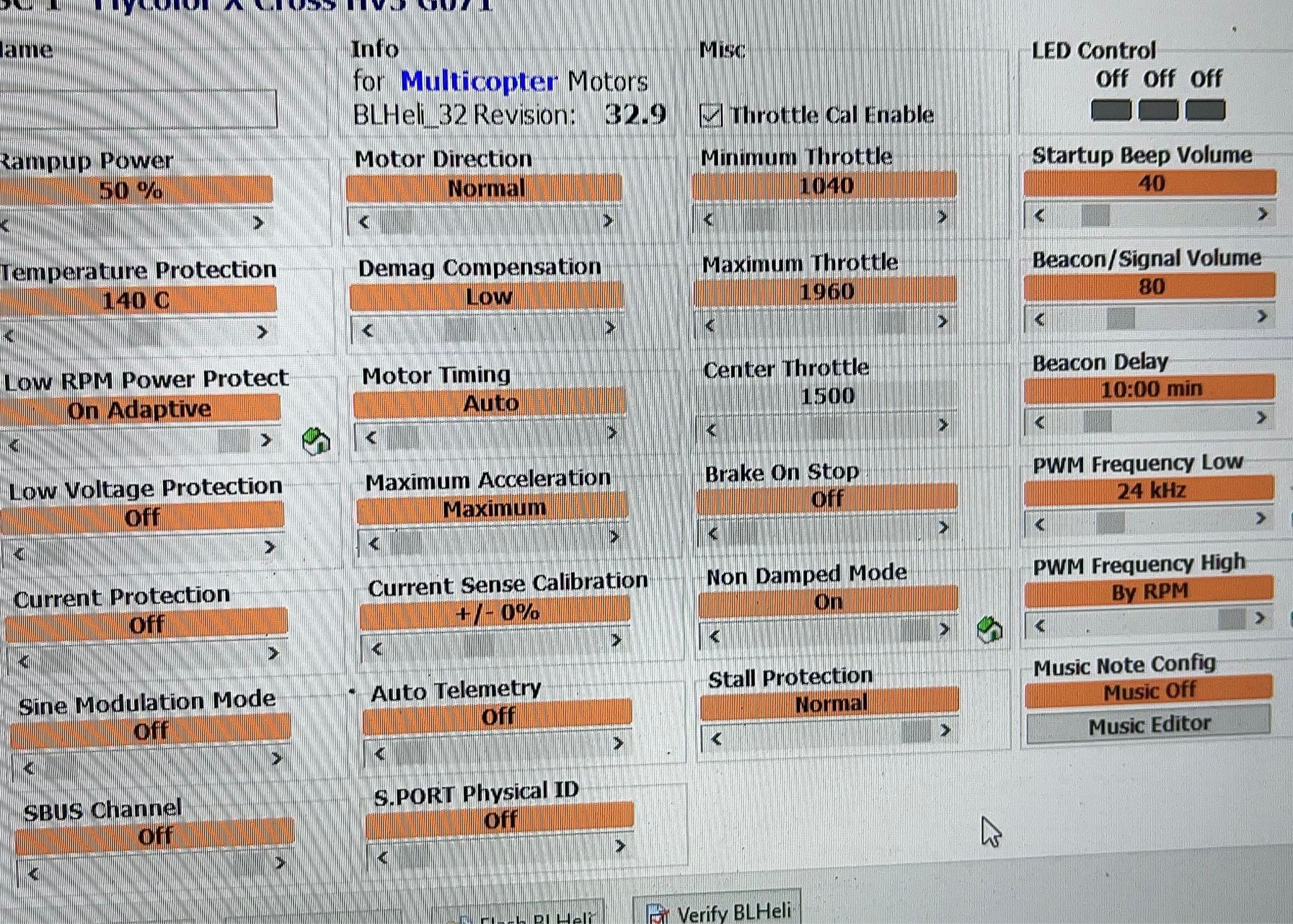
During my testing on a thrust stand, desync happens when throttling above 90% or rapid throttle change. I have turned demag compensation to very high and pwm to 16khz to 24 khz. And no improvement were made. Motor timing is auto.
Friend of mine told me that my long motor wire might be the cause of that but there is no chance I can cut it shorter except place the esc on the arm. (FYI, I’m planning using an aluminum power distribution board to solve the heating issue so it won’t overheat in the body.)
Any suggestions on the esc settings might help? I’m a rookie when it comes ti esc parameters.
I don’t think you should listen to your friend in this case. 25cm isn’t long, any larger multicopter with central ESCs will run cables with that length or longer.
Can you post a flightlog file with a desync happening and specify what FC you’re using?
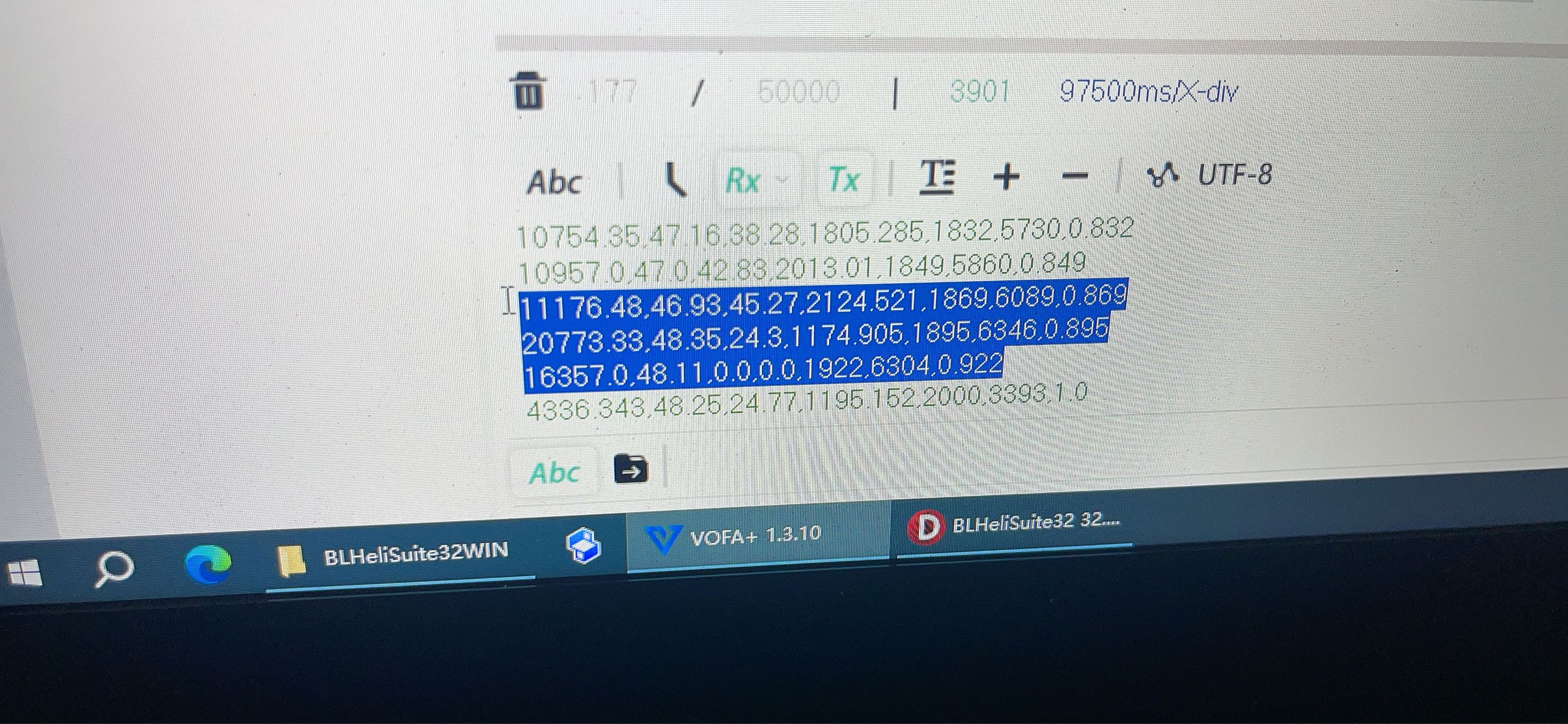
Each line from left to right are: RPM voltage current power PWM thrust and throttle%
Refresh rate is fixed to 4hz and those data is from the fc, outputed through a lua script controlled uart.
RPM is from bidirectional dshot, voltage current from esc telemetry, power and throttle% is calculated in the lua, pwm is from fc and thrust is from a weight module.
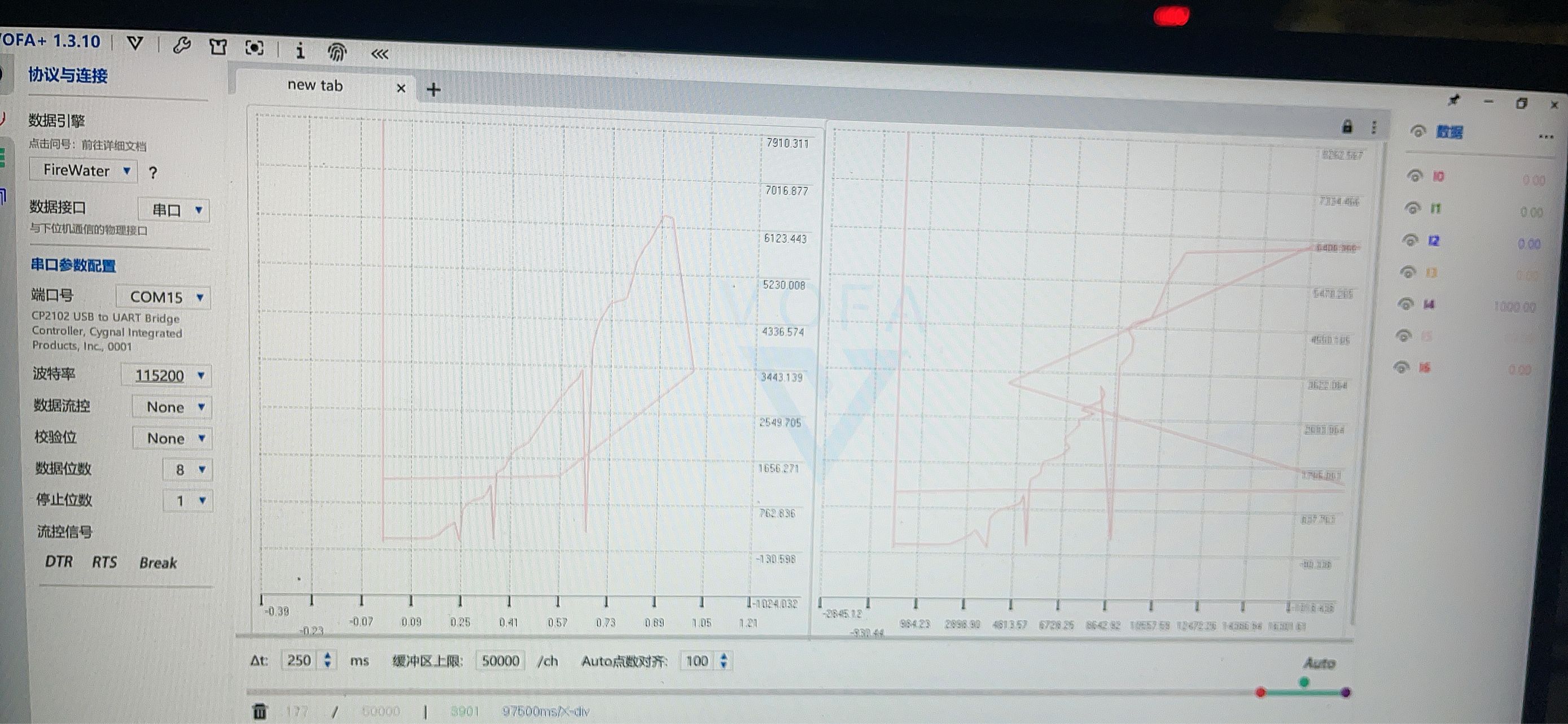
I found that the rpm jumped from 11k to 20k and this is when the motor stuttered. I think it is a esc problem but don’t know how to fix it. The current did go to 0 after the misreported rpm so I wonder if it is some sort of protection inside the esc.
FYI, I tested a 4214 400kv before testing this one, the 4214 went to full throttle no problem but it’s torque limited it to go above 10.5k rpm so I bought this even larger motor. (5215 losses power above 11k)
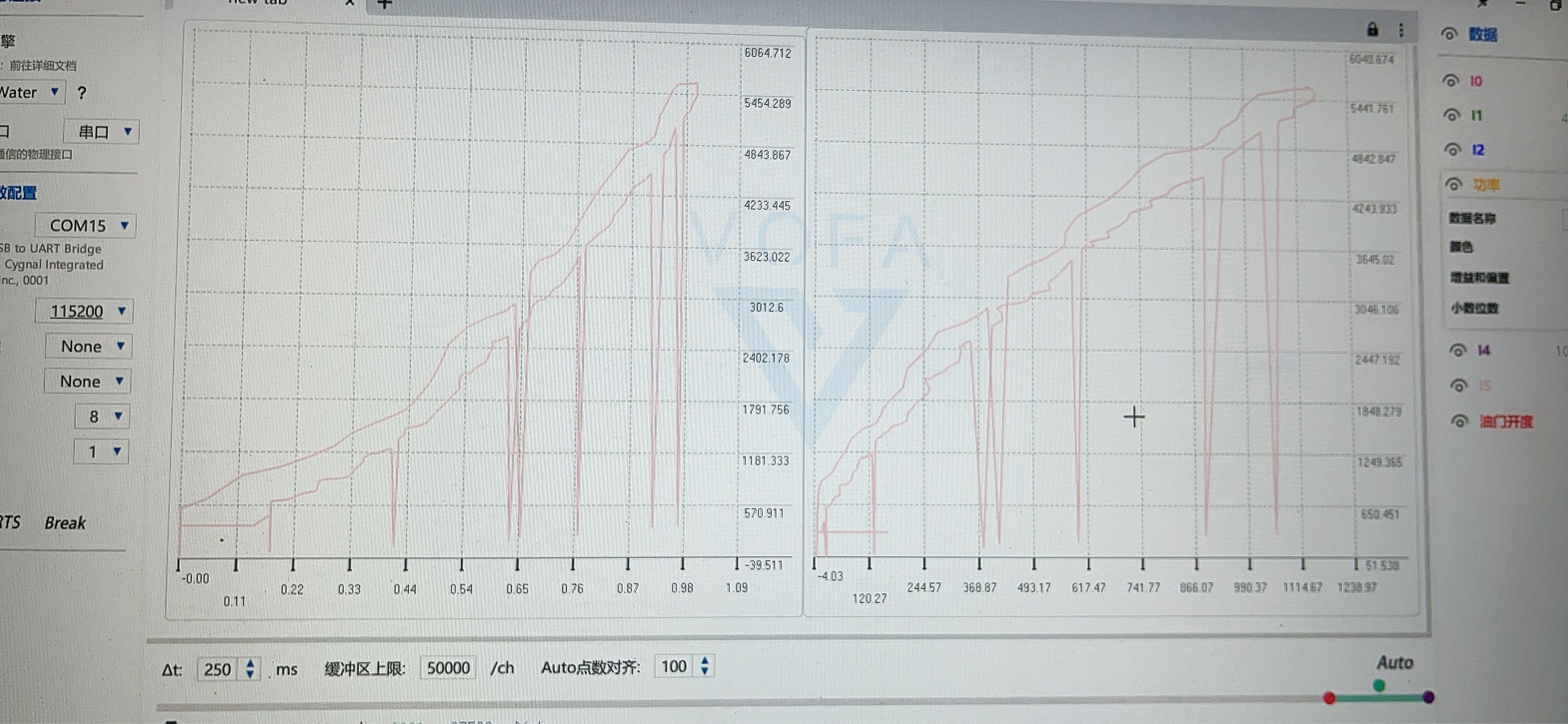
Tested data from 4214, left thrust/throttle right thrust/power.
You already tried increasing Demag in the BLHeli Configurator, right? You might want to try increasing the Motor Timing as well, these two settings are usually the first things to tune when it comes to desync issues.
Yes I have tried turning up demag. I just can’t understand motor timing settings and want some suggestions on how to set them correctly, to reduce the chance of burning the motor. Maybe I can start at 15 and increase by 3?
I don’t think you can kill your motors with wrong BLHeli settings (unless you’re shutting off protections and deliberately operate them outside their specs). I’d slowly increase Timing to see if it has any effect.
Also maybe flash the latest BLHeli version. I don’t think it will make the issue go away, but who knows.
I tried motor timing from 1 to 31 (min to max) increasing by 5 and it behaved exactly the same. Also tried spinning without load and it was totally fine.
I will post a video of its behavior later.
Flycolor support says it looks like a phase is lost at high rpm, and asked me to send the motor and esc back to them for investigation. I’ll be waiting for the result.