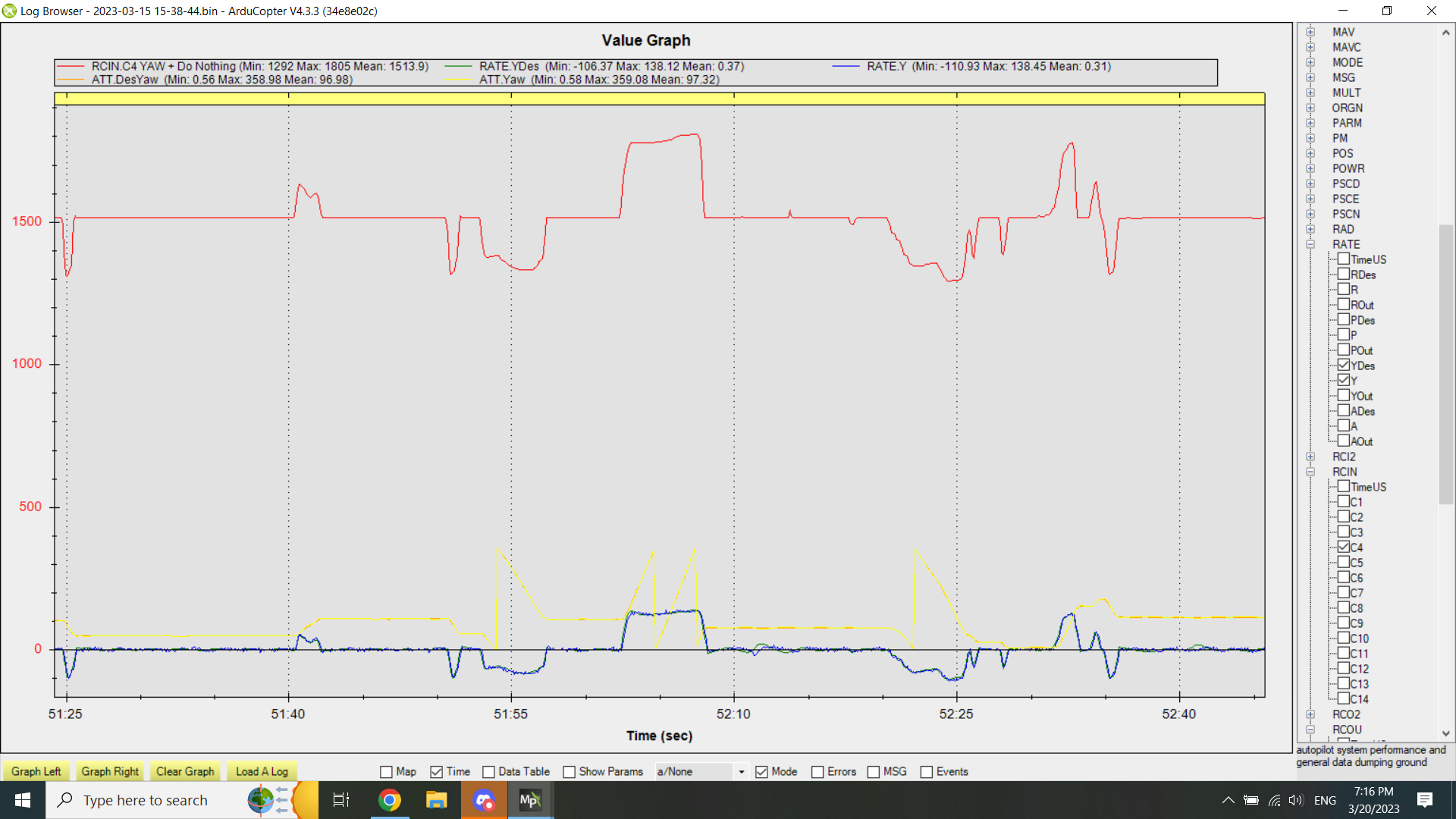
@wangjiayun I don’t see anything wrong with the log. You can see in this plot that all of the yaw rates are commanded by the yaw RC input. Are you using any collective to yaw mixing in your transmitter? That would be the only way to cause this.
This is a very strange place. Many of my regular helicopters have this fault. “It is normal to use RC YAW for rotation in the Stabilize mode regardless of how it is performed. Using RC YAW for rotation in the Loiter mode will cause the situation in the video, and the severity of the situation is proportional to the rotation speed.”. That is, the faster YAW turn, the more serious the angle of head up, the more serious the Brush the pot backwards course.Previous restrictionsACRO_ YAW_ P to limit the rotation speed, and the rotation operation can only be performed at a very low speed. Therefore,Pot brushing condition is not obvious and can even be ignored. Now, To improve the YAW operation rotation speed, and the problem must be looked at directly and solved. I have ruled out the cause of the center of gravity, Remote control RC has no hybrid control, No firmware parameter settings for PITCH or ROLL hybrid control. This fault phenomenon only occurs in Loiter mode. The rotation speed of the Stabilize mode is fast and usually stable. There is also a strange phenomenon: When using a separate remote control RC to operate the rotation in the Loiter mode, The situation is serious when going to the left YAW, The situation is not serious when operating to the right YAW. Moreover, the center of rotation of the YAW independently operated by the Loiter mode remote controller RC is not the center of gravity of the aircraft. Parameter INS_ POS_ X and parameter GPS_ POS_ X has also been set based on the actual installation location of the flight control, but it seems that these two parameter settings have no effect.
It seems that no matter how the POS is set, the malfunction of the Loiter mode using the YAW of the remote controller RC for high-speed rotation operation has not changed and is almost unchanged.
Have other enthusiasts used the Loiter mode to perform high-speed deflection using the remote control YAW? Is there a phenomenon that the Loiter mode only outputs YAW commands and a PITCH pull rod phenomenon like me? My remote control YAW and PITCH are separated from each other by two control levers, preventing incorrect operation. Is the firmware algorithm missing automatic balancing of PITCH or ROLL during fixed point autorotation in Loiter mode? Therefore, the faster the autorotation speed of the Loiter mode, the more serious the fault. I remember that during a firmware upgrade, in order to maintain a beautiful attitude during flight in Loiter mode, YAW was added for yaw steering during flight, and the ROLL attitude was automatically added to achieve the effect of maintaining the helicopter’s tilt attitude during yaw steering. Is it a side effect defect caused by this function? Also leads to Causes the in-place fixed point self rotation to automatically join the PITCH or ROLL hybrid control?
I’m very sorry for my poor English. I wonder if you can fully understand
I have repeatedly proofread through translation software and raised the environment and conditions under which the problem occurred.Can you give me a reply? Are there any other enthusiasts using the remote control YAW in Loiter mode to perform high-speed fixed point rotation operations? Generally, if the center point shifts during fixed point rotation in the Loiter mode,Excluded center of gravity imbalance, compass interference, and poor GPS positioning accuracy,Exclude the setting of the steering gear hybrid control… What other errors can cause a fixed point rotation not centered on the center point of the aircraft? Is it a firmware control defect? Or do I have other settings that I didn’t take into account that can cause the Loiter mode Drift occurs during high-speed rotation at a fixed point, and the pot is brushed?
Ok. I think I understand your concern. It is not that the aircraft yaws when the rudder stick is not moved. It is the movement of the aircraft position in a circular motion while you are causing yaw rotation.
The other thing I noticed while reviewing your log is that the aircraft control system was never tuned. I think that could be the main reason you are seeing this circular movement in the position of the aircraft. I recommend you tune the attitude controller.
Thank you very much for your answer. I have been puzzled by the problem of self rotation. So I’m in a hurry to solve the problem. I just simply debugged the PID and didn’t carefully debug it if I could fly without crashing. I just wanted to find an answer because many of my planes have never really solved this problem before. Although they have undergone careful debugging,Before looking for rotation issues, I will first carefully debug the PID, I also call on other enthusiasts to test the effect of Loiter mode’s fast self rotation at fixed points. Although being a drone may not require high-speed fixed point rotation, But as a enthusiast, when encountering imperfections, one should strive for perfection. The goal of continuous firmware upgrades is also closer to perfection. I hope that enthusiasts can upload stable videos of Loiter mode high-speed fixed point spinning. Let me be sure it can be done. I would be very grateful.
Earlier, the automatic parameter adjustment function was used, resulting in serious crashes,I have never dared to use the automatic adjustment function. At that time, RC6 was set as an automatic adjustment parameter. After the aircraft took off, RC6 was successfully turned on at the the Loiter mode to enter automatic adjustment. The aircraft flew back and forth in the air on its own, and the MP window repeatedly sent back the display of ************ parameters dropping or rising. The aircraft suddenly started to tilt back and forth at a large angle. I urgently turned off RC6, quickly switched back and forth between self stabilization andthe Loiter mode , and used the remote control to try to take over the flight.", The airplane became very difficult to control. Eventually leading to a crash. From then on, I dare not try the automatic parameter adjustment function. Is this automatic parameter adjustment function trustworthyc? Can you provide instructions or related links for the automatic parameter adjustment function. Thank you.
A bit of loiter “fixed point” pedal turn😝 .

Like you, mine looks very stable after limiting the rotational speed. If the YAW rotation speed is increased, the stability will be poor.So I also hope you can improve the yaw rate and test it. See if you can spot the problem. ACRO_ YAW_ PIncrease this value for faster fixed point yaw rotation , we can exchange experience through this exchange platform
[<iframe height=498 width=510 src=‘优酷视频云’ frameborder=0 ‘allowfullscreen’>](<iframe height=498 width=510 src=‘优酷视频云’ frameborder=0 ‘allowfullscreen’>)
How fast do you want to rotate the aircraft? 60 deg/sec? 100 deg/sec? What is the purpose of rotating at high rates?
The yaw rate you see is set to have flight envelope always within limits both in terms of tail rotor blade angle of attack and extra control margin for side wind resistance.
Your case seems to be different as you are using torque reaction for achieving yaw rotation, so the stability problem could be due to other factors. How much “extra” collective you applying on top of hover collective when you see stability degradation during yaw turns?
Large unmanned aerial vehicles do not require rapid self rotation and other high-speed maneuvers because their strength cannot be sustained. However, I also hope to try to achieve perfect control on small helicopters, such as the 450. As an entertainment product, it is good for small conventional helicopters to be able to quickly rotate themselves. Is the helicopter firmware an accessory to multi rotor firmware? Multi-rotor structures are mostly symmetric structures, and because sufficient lift is required to be maintained by rotating speed, it is not possible to sacrifice too much rotor speed to obtain self rotating speed. Therefore, the toilet effect cannot be reflected during self rotation. My understanding: The structure of a helicopter can support rapid self rotation, Due to asymmetric structure, the air flow is chaotic,. Therefore, fixed point self rotation needs to be independent and used to balance the functional algorithm parameters of the fuselage. As enthusiasts, our personal abilities are limited, and our love of ardupilot should make it more perfect. This should also be the driving force for those of us to communicate here.
I don’t think it’s the reason for rotor debugging, because the helicopter’s rapid self rotation in self stable mode is almost stable, and there is no toilet effect. Therefore, I doubt whether the problem is caused by more sensors enabled in the Loiter mode, perhaps due to sensor errors, or firmware parameter algorithm defects.