As the flying time was short, I bought new 6S 10000 batterypack,and copter weight was changed to 3.45KG.
When I flyed it again,I found my copter was unstable,it looked like the copter want to balanced one arm but it overdose.
I had tryed the following:
stable PID tuned down or up
loiter PID tuned down or up
Recalibrate Acc,compass.
I found nothing changed,any idea to help ?
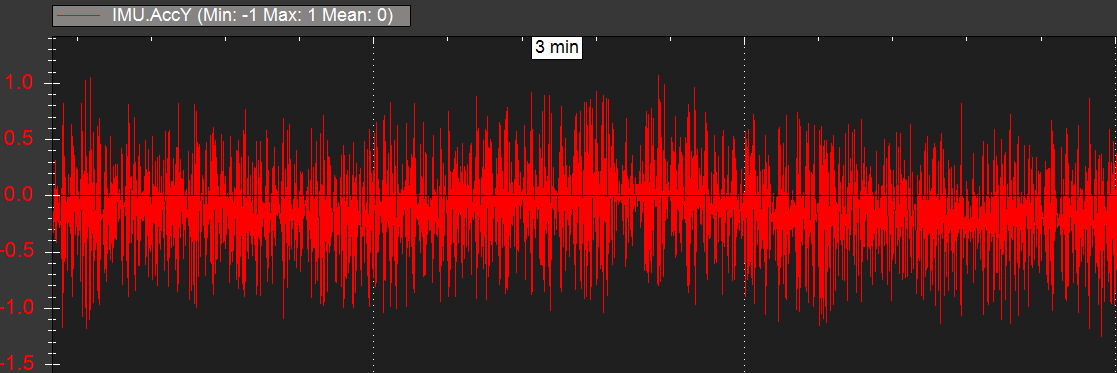
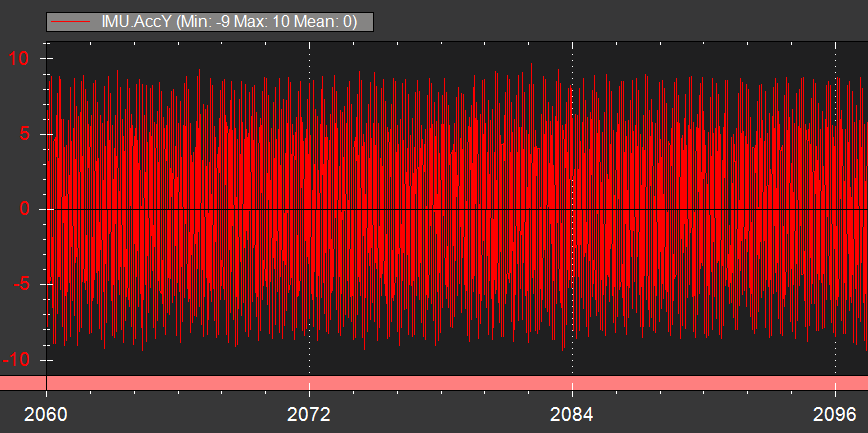
Here is the IMU AccY between 6s 5400 and 6s 10000:
6s5400:
auto analysis:
Firmware Version V3.4.6
Firmware Hash e707341b
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (6.84%)
Max mag field length (569.03) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.28, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1465, 1449, 1432, 1429]
Average motor output = 1443
Difference between min and max motor averages = 36
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = GOOD -
You should definitely find what is causing that vibration in the Y axis and fix it.
It might be something as simple as wires touching the flight controller, or something loose on an arm.
Worth investigating.
Power wise the copter is coping well with the larger battery but seems to be over tuned, especially in roll.
An auto tune is probably the next step after updating your firmware.
As you are running 15" props, have you adjusted the filter params?
Have a read here
Thanks for your reply!
In fact, I have been looking for what is causing that vibration in the Y axis, but No result yet until now.
I think I have try all I can do,so that’s why I’m looking for help.
I have used a laptop to run mission planner to view the status of flying,when it used 5400 battery pack,all mode is stable and ok.
But it is really bizarre,I land the copter,remove 5400 battery pack,replace to 10000 battery pack ,takeoff, the jitter appear. I do nothing except touch the safe switch.
I hope updating firmware should work.
What is filter params mean?Is it a new parameter in 3.5.3?
The difference probably isn’t the battery capacity. It’s the weight. The average hover RPM is bumped up for the greater weight, perhaps right into a frequency that your flight controller mount can’t deal with. I’d look into addressing prop/motor balancing and flight controller isolation before getting into tuning.