I have a problem with my new copter, It seems that in stablize and althold mode it works smoothly. But in Loiter sometimes it works correct but sometimes, when I slighty push throttle stick it goes to sky (hit max) and then i have to change to althold to take control.
Now I am testing with extra payload to stay grounded and check the throttle which sometimes works correct and it can disarm but other times it goes to max immediately and it refuses to lower thrust and eventually disarm.
I tighten the things to reduce vibrations I decreased MOT_thrust-hover to 0.3 I tried to activate deactivate the moh_hover _learn (0 or 2). it still remains sometimes is fine sometimes no.
It’s not likely they were causing massive problems though.
And now connect to MissionPlanner, Initial Parameters
Put in your prop size and battery cell count, select “Suggested settings” too, press Calculate
and accept everything it offers.
Then set these:
Leave hover learn ON since you dont appear to be getting stable flight at the moment.
When you arm and motors spin, and you give it some throttle, there is a huge voltage drop and quite a current spike. Is your battery wiring all in good order? and not a series of connectors one after the other?
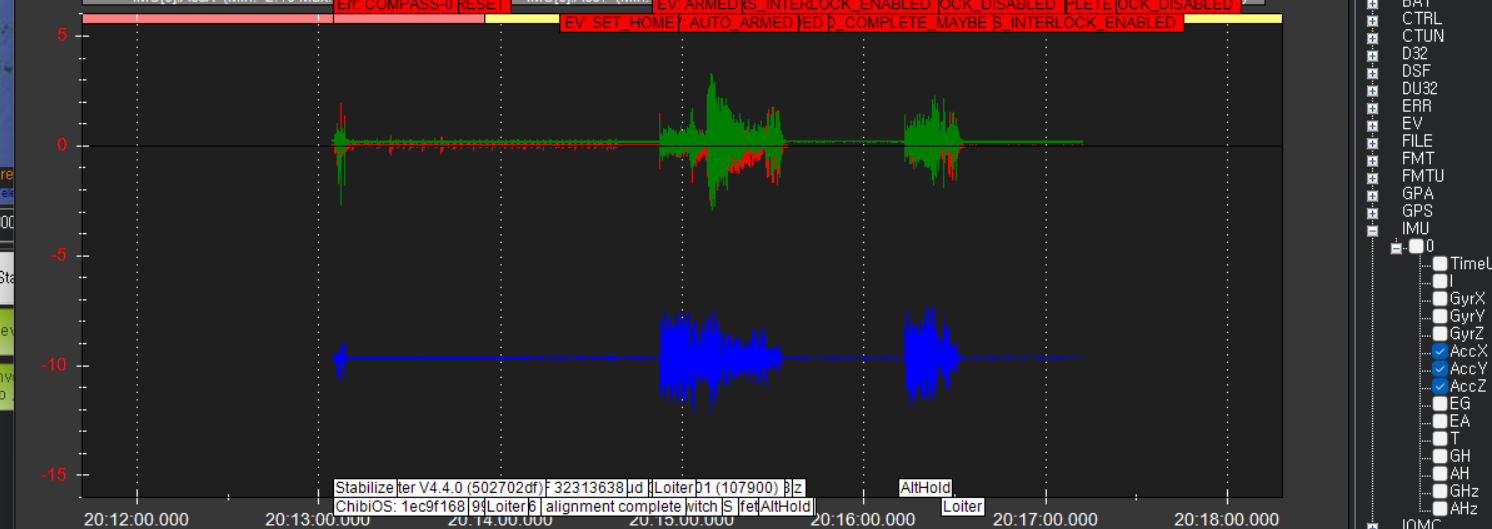
I think the vibrations are not so much. I used M3 for battery and ESC besides straps to absorb vibrations. But i think it is acceptable according to forum.
P.S. In this case, drone is kept down with “heavy” payload, to avoid accidents until I manage control Loiter.