Hi, I have been attempting to tune a quadcopter with large props, but having problems with overshoot/oscilations in loiter mode, and instability in high wind. The quadcopter configuration is below:
Config:
All up weight: 10kg
Motor/ESC: TMotor U8 Lite 190kv / TMotor Alpha 60A LV
Propellor: 28x9.4 Folding propellor
Battery: 6s 22000mAh
Autopilot: Cube Orange on Kore Carrier Board
What I did:
-
Calibrated ESCs and setup SPIN_ARM and SPIN_MIN parameters properly
-
Followed all instructions in https://ardupilot.org/copter/docs/tuning-process-instructions.html to set up the parameters based on the prop size and battery voltage.
-
Test flew the aircraft with stock PID’s, the aircraft felt loose on pitch and roll but not unstable
-
Autotuned the aircraft on Roll, Pitch, and yaw. There were no problems in autotuning, felt pretty safe
-
Flew the aircraft with the new gains, the aircraft feels better than the stock gains to fly in stabilize and althold, but in loiter mode, when coming to a rapid stop after moving fast, the aircraft builds up oscilations, which do settle down eventually but are very unnerving
-
Flew the aircraft in 15 knots of wind (all previous was dead calm), in alt hold mode, the aircraft was rapidly blown to a 35 degrees angle (uncommanded), though it did later recover to flat and I was able to land it.
Settings I have changed since autotune in an attempt to improve performance:
Changed ATC_THR_MIX_MAN from 0.1 default to 0.5, this improved performance in alt hold, didnt seem to help in loiter.
Lowered loiter acceleration settings from the defaults to avoid the aircraft jerking on stopping. This helped slightly in loiter but there are still uncomfortable oscilations.
Logs:
Two logs can be found at this dropbox link:
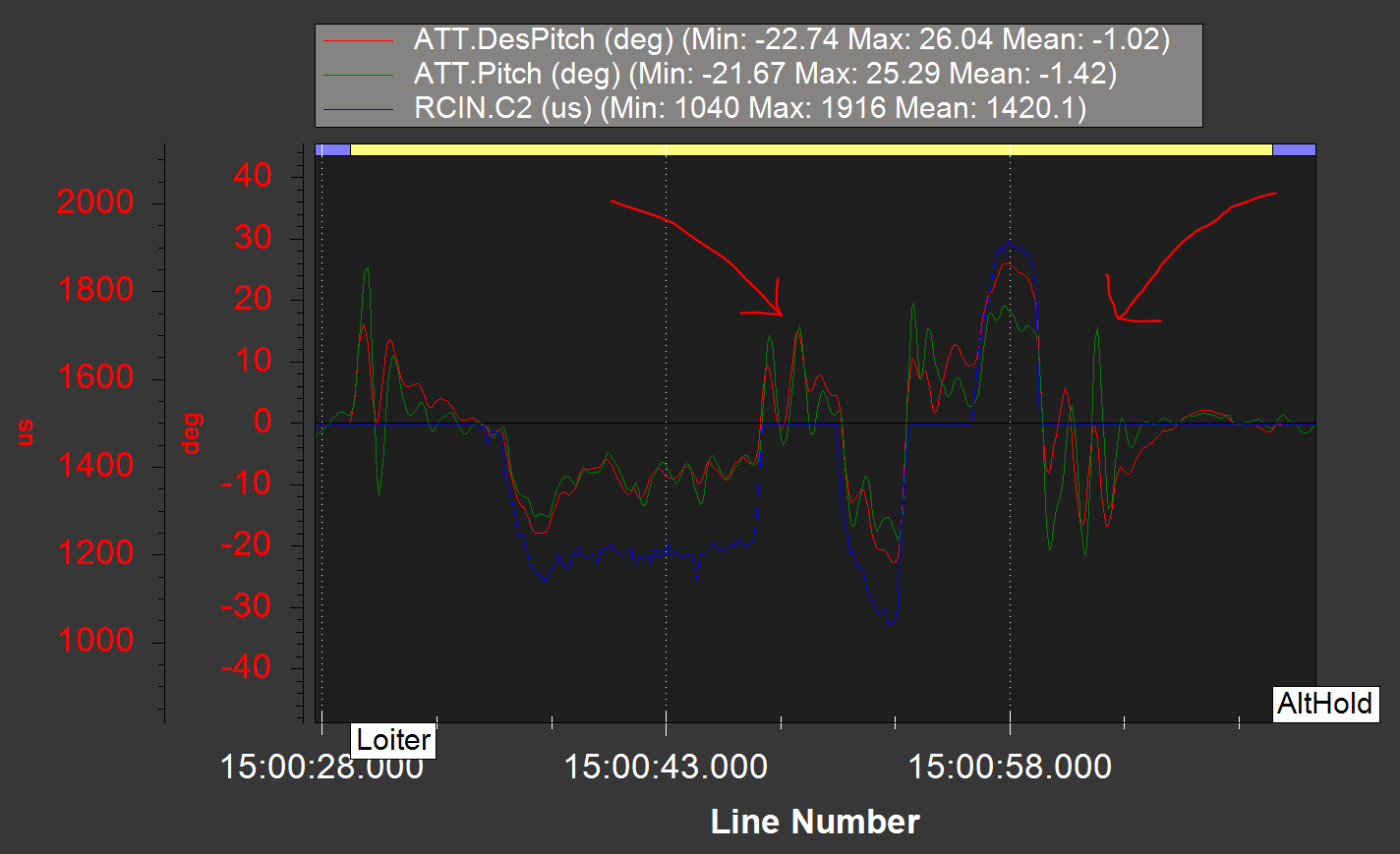
One is of flying hard in loiter flight mode, showing the oscilations that build up on hard stops.
Here is a screenshot from that log showing the uncommanded oscilations:
The second is of a short flight in 15 knots of wind where the aircraft immediatly became unstable.
Thanks in advance, I would be grateful for any help, and happy to try any settings suggest and provide any more logs that might be helpful to analyze!