the first out of control occurred at 2022.10.28,the link:
yesterday ,I change the bank angle to 30 degree ,WP_RADIUS to 60m,then fly my plane ,the same breakdown occurred ,in loiter mode ,The throttle automatically increases to maximum suddenly ,then the roll didn’t follow the desroll , the plane keep on roll,I Switch to fbwa mode ,although ardupilot level the plane ,but altitude is to low,the plane crash to the ground .
I don’t know why the ardupilot automatically increases throttle to maximum suddenly in loiter ,the plane’s speed is OK , why ?
the plane’s flight track is strange in loiter mode ,not a circle ,why ?
please help me ,help me analyze the flight log ,find out why ?
the flight log link :
I also have an AtomRC Seal Wing and I don’t experience the incidence you have. In my case my limits are LIM_PITCH_MAX,4000, LIM_PITCH_MIN,-4000 and LIM_ROLL_CD,6000.
I also fly with Ardupilot v4.2.3, so comparing parameters I find the following in your parameters
ARSPD_AUTOCAL,1 >>>>> should be 0
ARSPD_USE,0 >>>>> should be 1
ARSPD_FBW_MAX,15 >>>>>> very low, I use 30
ARSPD_FBW_MIN,8 >>>>>>> for safety I use 10
SERVO5_FUNCTION,4 >>>>>>> this is unnecessary if you use flaperon
SERVO9_FUNCTION,24
SERVO10_FUNCTION,25
TECS_PITCH_MIN,0 >>>>>> Your aircraft cannot lower the nose in automatic modes!!!
TRIM_ARSPD_CM,1000 >>>>> Too low, I recommend minimum of 14
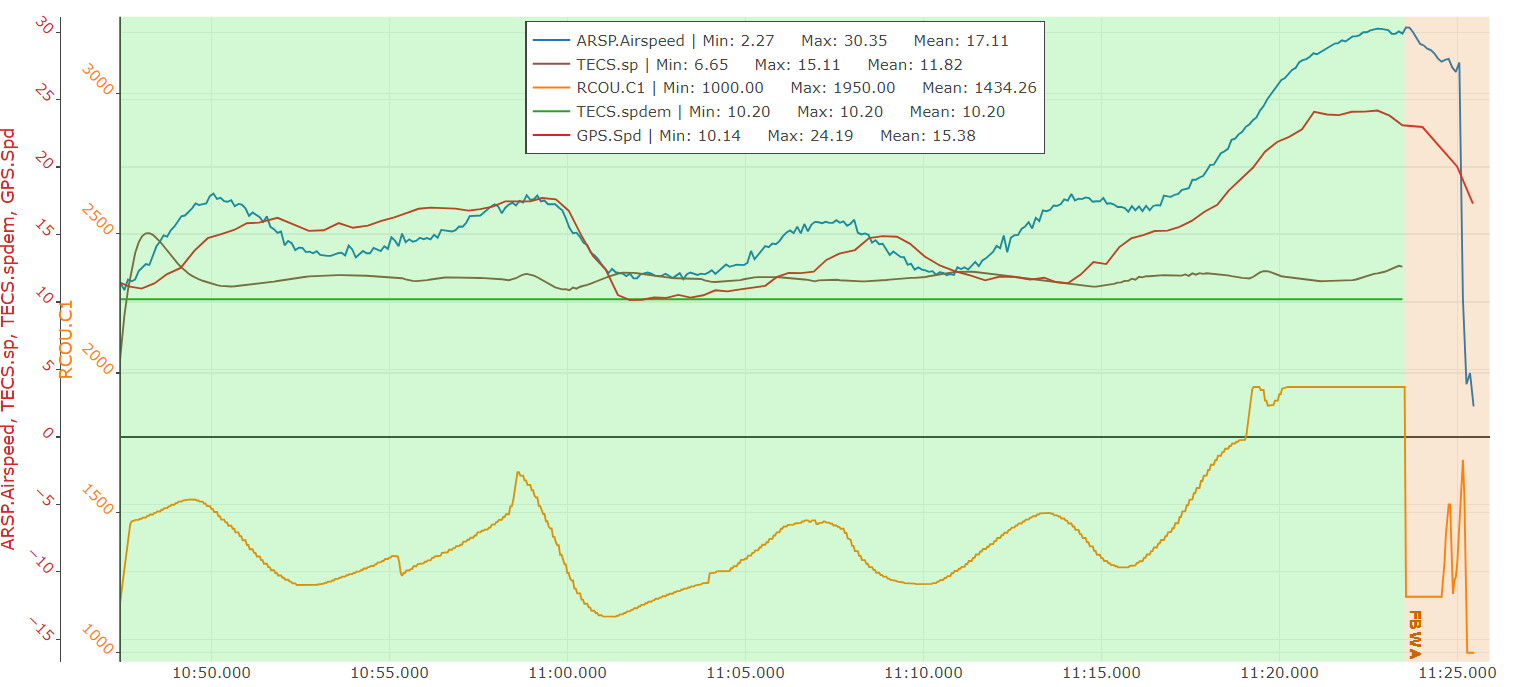
From the log it can be seen that at 11:22 begins a stall in roll and pitch (divergence between demand and execution). At that moment the airspeed (ARSP.Airspeed) is “supposed” to be 29m/s but considering the above mentioned configuration I don’t think it is true. I guess closer to reality 11.61m/s (TECS.sp).
First the stall starts on the PITCH at 11:22.182 at 11.61m/s and is followed by the ROLL at 11:22.284 at 12.17m/s.