In Loiter mode,
While moving the drone frome one point to another point its holding the constant alttitude.
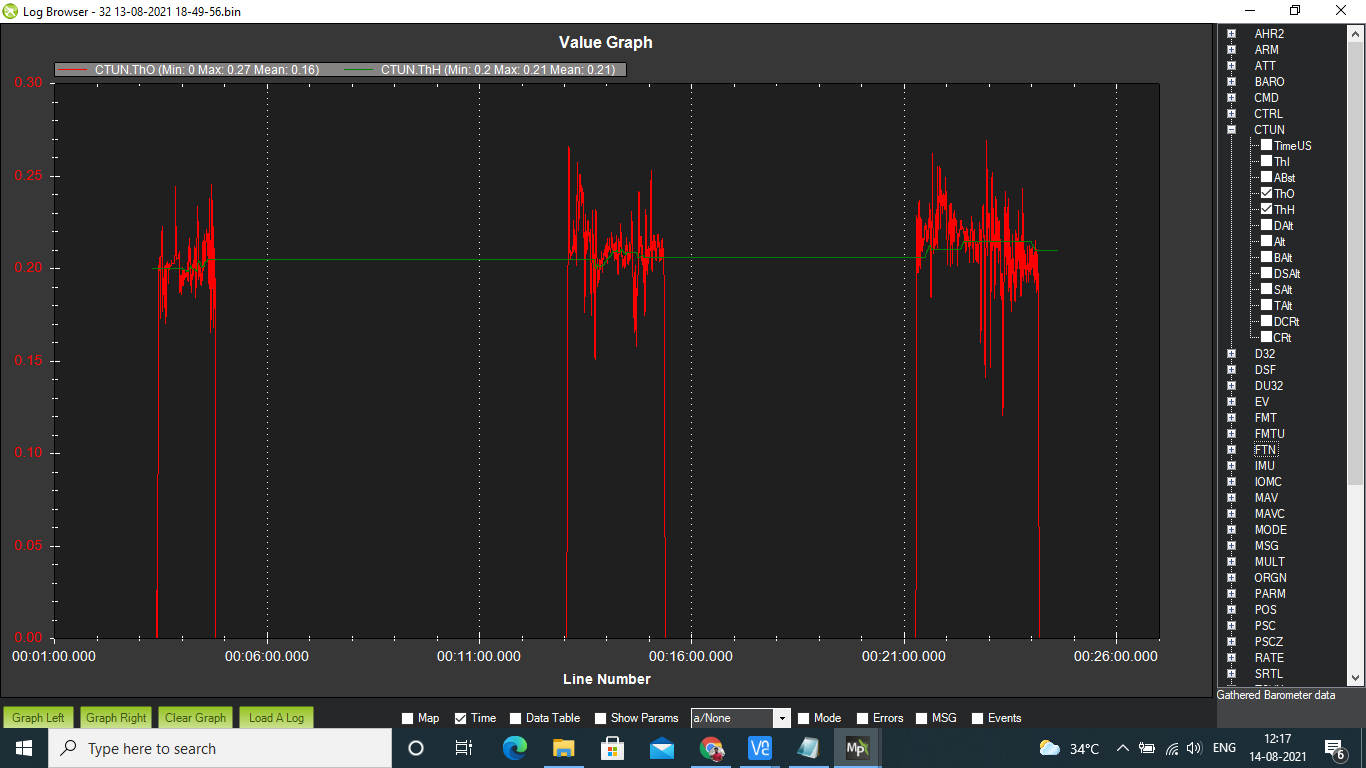
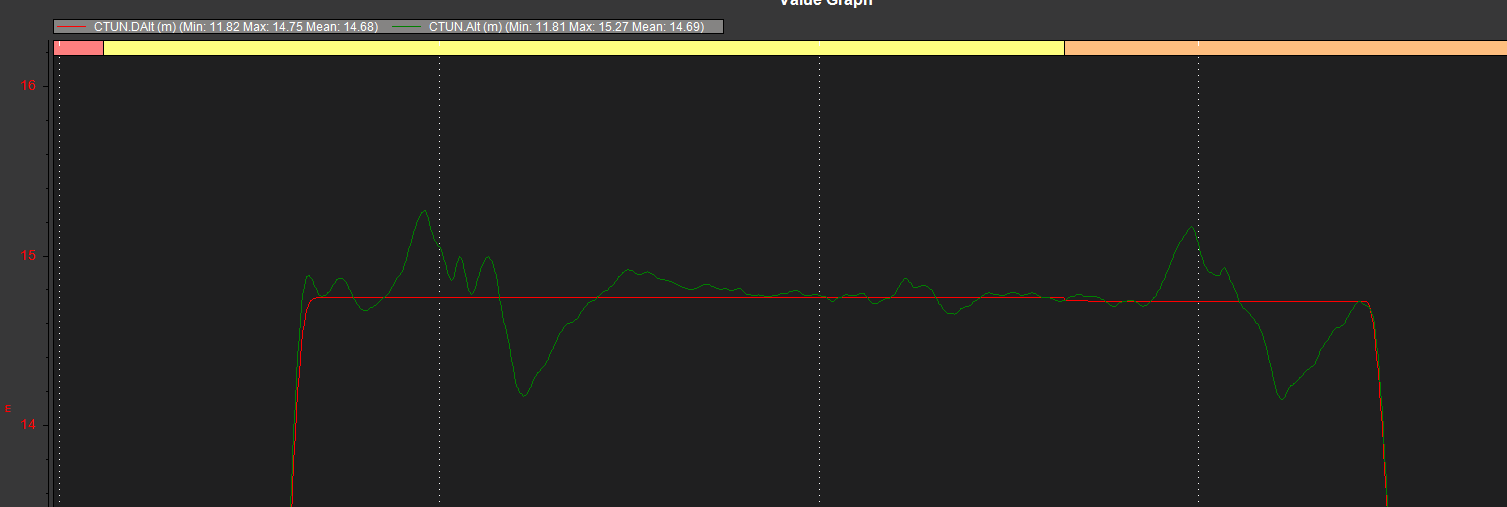
But when I leave the pitch or roll stick to the middle position drone is stopping at one point but its going down around 1 meter then comming back to the actual alttitude.
How to solve this isues?
Please let me know.
Note:
I am using Mission planner beta version 1.3.75 and Copter 4.1.0 beta version.
We would need to see the .bin log file.
That effect can be caused by improper tuning of some PSC params or even prop wash across the flight controller (barometer in fact)
Set these and retest
ATC_THR_MIX_MAN,0.5
PSC_ACCZ_I,0.4
PSC_ACCZ_P,0.2
Ensure the barometer is not exposed, and the props are not over-flying the flight controller.
I would also set these
ARMING_CHECK,13822 (or 13814 if you really dont have a GPS)
LOG_BITMASK,161790