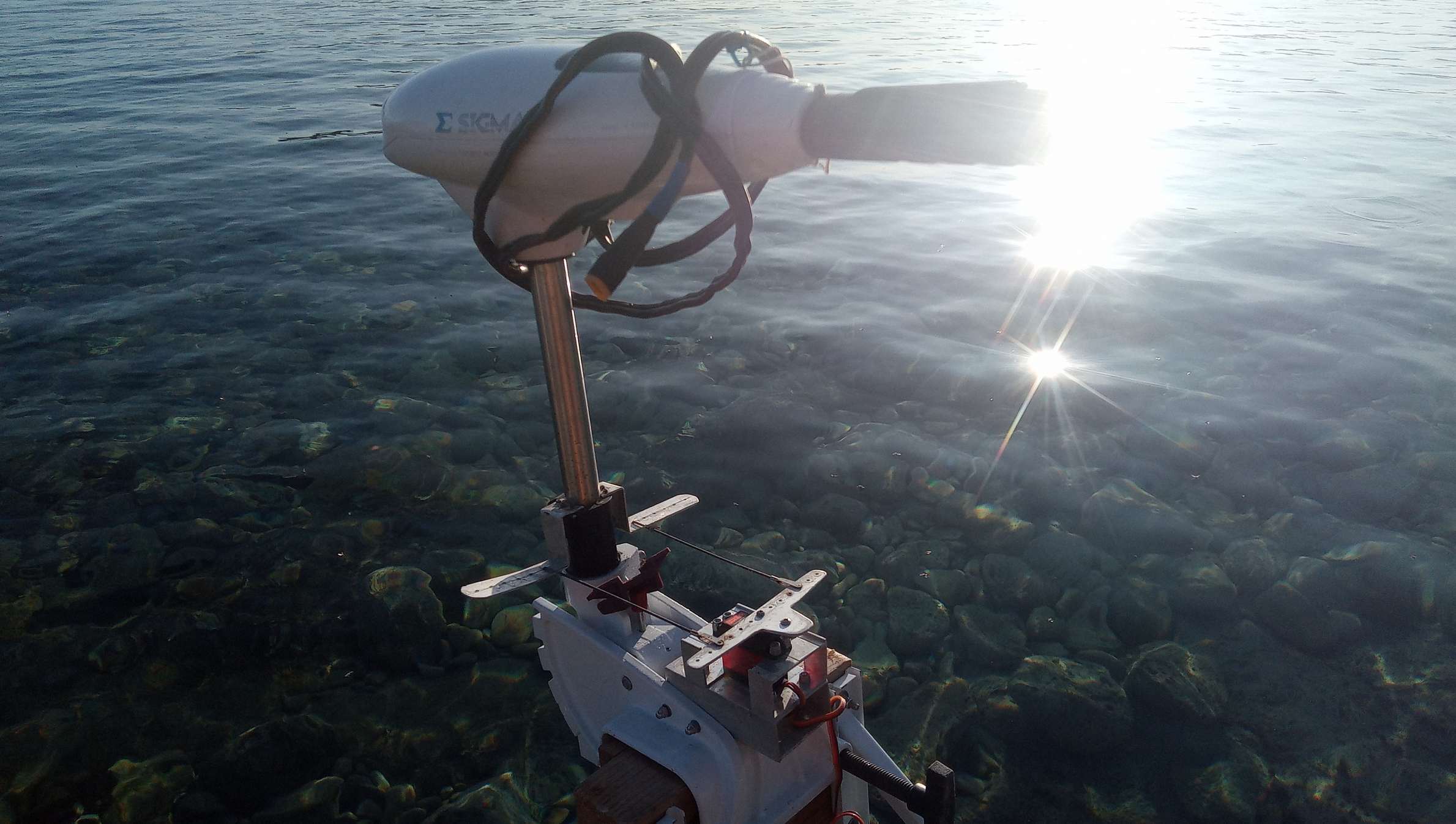
Hello community, i’m Nicola, experimenting with a 3mt. canoe driven by Ardurover 3.5.1 on a pixracer,external gps and compass, with a 56lb trolling motor, 60a esc and 25kg servo for the rudder, it’s more or less all working, it needs some more tuning but i’m very happy with it as a prototype!
I Just have some issues with Loiter mode wich i use against wind.
When activated if the canoes exits the radius with the front facing the target, the servo always swings back and forth some times before the motor is activated, here is a video:
is that normal and is it possible to smooth, like throttle slew, the servo movement for longer servo life?
Another issue is in strong wing, my canoe’s nose always turns in the opposite direction of the wind because of its shape.
In loiter mode with a small radius is set, the canoes tries to keep the back facing the target, the strong wind, often changing slightly the direction, drifts my canoe soo much laterally to the target, that at some point it goes foward, rotates on itself 180%, and reaches the target facing it, then the wind makes the canoe rotate again in the opposite direction, and this continues in loop.
Could be possible to have a LOIT_TYPE 2 option to force the boat always facing the target with the back, as opposite of LOIT_0?
Thanks in advance for any feedback and for the great work!
Here are 2 logs and the parameters, i tried to play a bit with the STR parameters but the swinging of the rudder in loiter still happeneds. Any idea/suggestion?
Thanks
Nicola
Hello Nicola, i’m trying to build a similar setup like yours. You have done a real good job. Can you please share some photos of your setup? Did you cut the trolling motor cables and connect it directly on the esc?
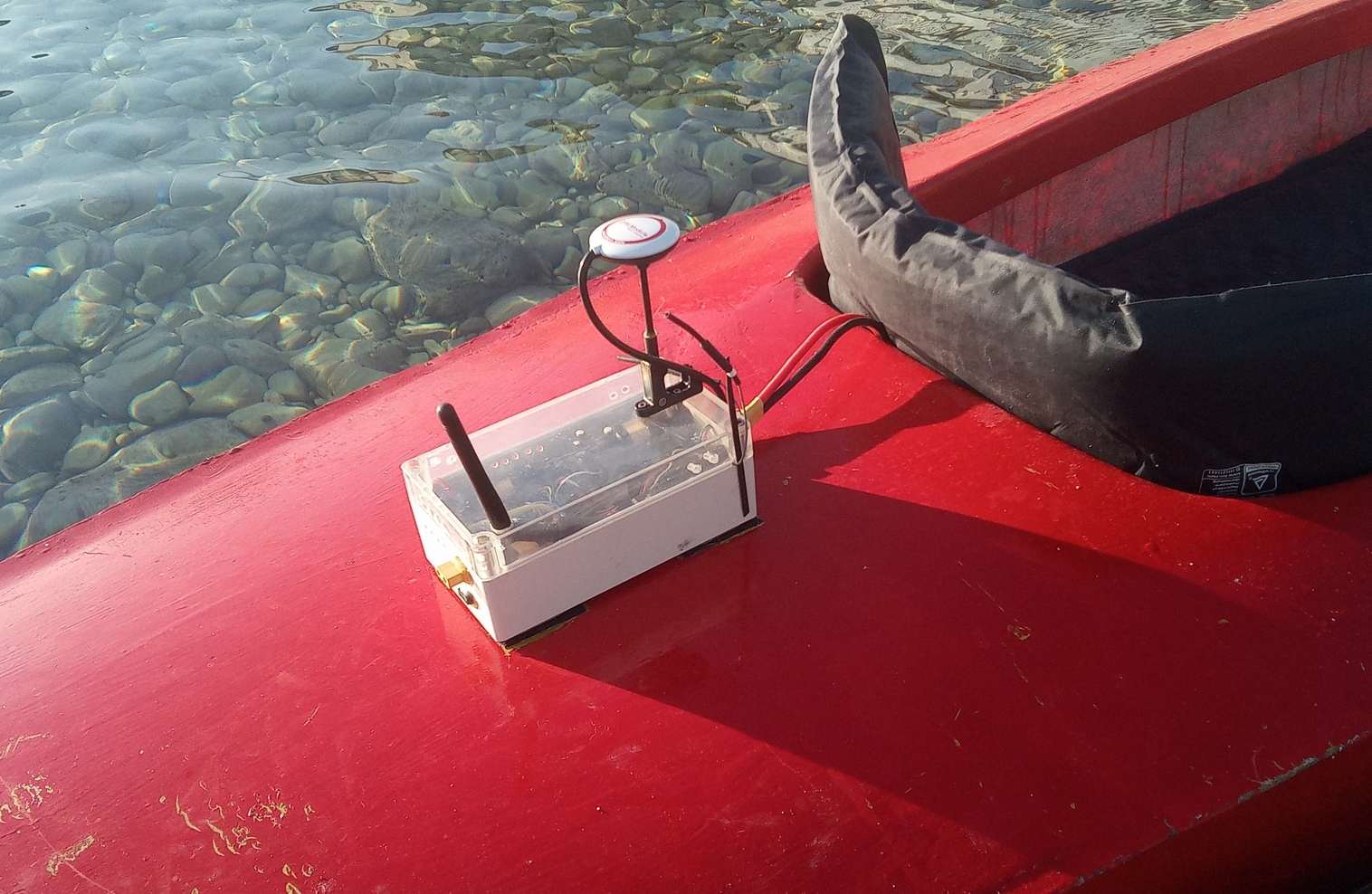
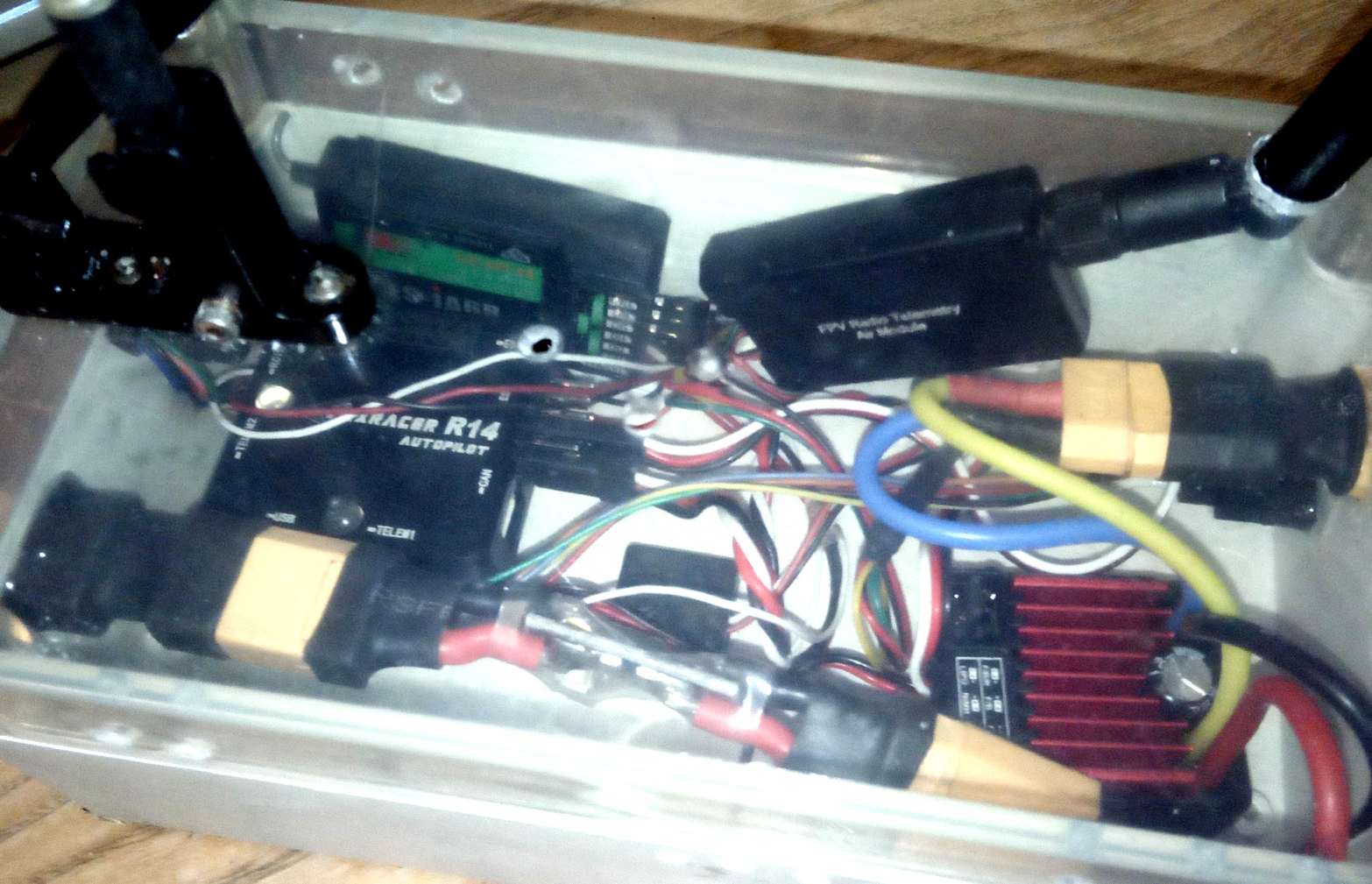
The battery is behind my back and about the motor i disconnected the manual switch inside, and linked the + and - motor wires directly to the main wire with the xt60 connector, wich is linked to the eletronics box, the servo cable too.
i had problems with the quicrun 60a esc, enclosed like that it would overheat and cut throttle after a while in a mission. No problem when loiting. The motor uses 25A at full throttle, i’ll try to put a small fan on it.
@SapoLab, Looks like a fun project. Did you resolve the steering oscillation problem? I have something similar which is preventing me making any progress - actually, the problem is not that similar as mine is much higher frequency with a more stable period. It is documented here: BuoyBots - self position holding buoys for RC sail boat racing . I’ve downloaded your log files. I see no loiter mode in the 13 Sept log, though there is a guided mode. The 10 Sept log shows a loiter period where the behaviour doesn’t look too bad - certainly better than mine.
@MoretonBayKiting thanks! No i didn’t solve it, i did some tuning tests but ended up not using loiter for fishing in place, and moved on trolling fishing in mission mode.
I will test again in a month or so when/if i get to the sea.
I wish the issue will be solved in the code updates over timeor at least to have a paramater to dampen the servo movement over time.
The logs are from 3 years ago, can’t remember much about what was recorded in the whole
Your issue is only in loiter mode? missions in auto are fine?
We’re early in development, @SapoLab, though having some success. For example: https://www.qrya.com.au/index.php/home/latest-news/503-rc-club-saved-by-a-robot . We haven’t even used mission/guided mode! The only requirement is, so far, to drive to a station, then loiter there. We’ve largely resolved the oscillation problem albeit with a rather unsatisfying fix - we’ve added skegs that physically damp the over-steering. With such a long vessel, you could get a lot of yaw damping from a small fin at the bow - but this assumes that the cause of your oscillations is similar to ours. A relatively small lee board deployed from the cockpit might be a simple solution. A software fix to implementation of the derivative term in the steering PID controller would be far more satisfying. I’m afraid I’m not very quick at diagnosing such problems and am pressed for time presently. But it is on my list to try to sort out.