Can someone help me, this is my first build with a APM however I am not new to Copters and Helis and their electronics.
Although there are a lot of info and problem solving posts on the Loiter mode (and the main arducopter instructions), I needed to open this thread because I did my homework and calibrated/verified everything needed for a healthy Loiter performance and it still does not work…EVERYTHING ELSE works excellent…I am out of options.
I have the latest version loaded on the APM 2.6 and latest MP installed. (Tried to reinstall a few times, but makes no difference)
Loiter does not hold position but fly’s away when engaged.
- Stabilize Mode is perfect, with no wind you can almost think its in loiter mode
- Alt Hold is very accurate and rock solid.
- GPS is locking10 Sat and tried Loiter when it was under 2 HDOP (Actually is was pretty good holding 1.4 HDOP) (GPS is the Ublox LEA-6H)
- GPS Orientation is set correctly showing North on mission planner when aircraft is facing North.
All calibration has been done successfully and fall between the nominal/acceptable ranges, radio, compass, gyros, etc.
Logs
I was getting some glitches in the GPS but I believe them to be minor and overall it stays under 2 HDOP
Vibration log - Got it better than I expected, graph shows vibrations between +1 and -1 on AccX and AccY and between -9 and -11 on AccZ.
Ran compassmot test on CLI and I have a low motor to compass interference of 14% (Under 30% is good)
Declination is right on for my magnetic field in Boynton Beach. I tried both auto and manual to eliminate all doubt. Also flew one time with “tuning declination from ch6” adjusting while flying with no change to a healthy Loiter hold.
My compass offsets are pretty good at:
Compass_OFS_X 16
Compass_OFS_Y 15
Compass_OFS_Z 5
Ran “motorsync” in the CLI, all good there…my motors are in sync.
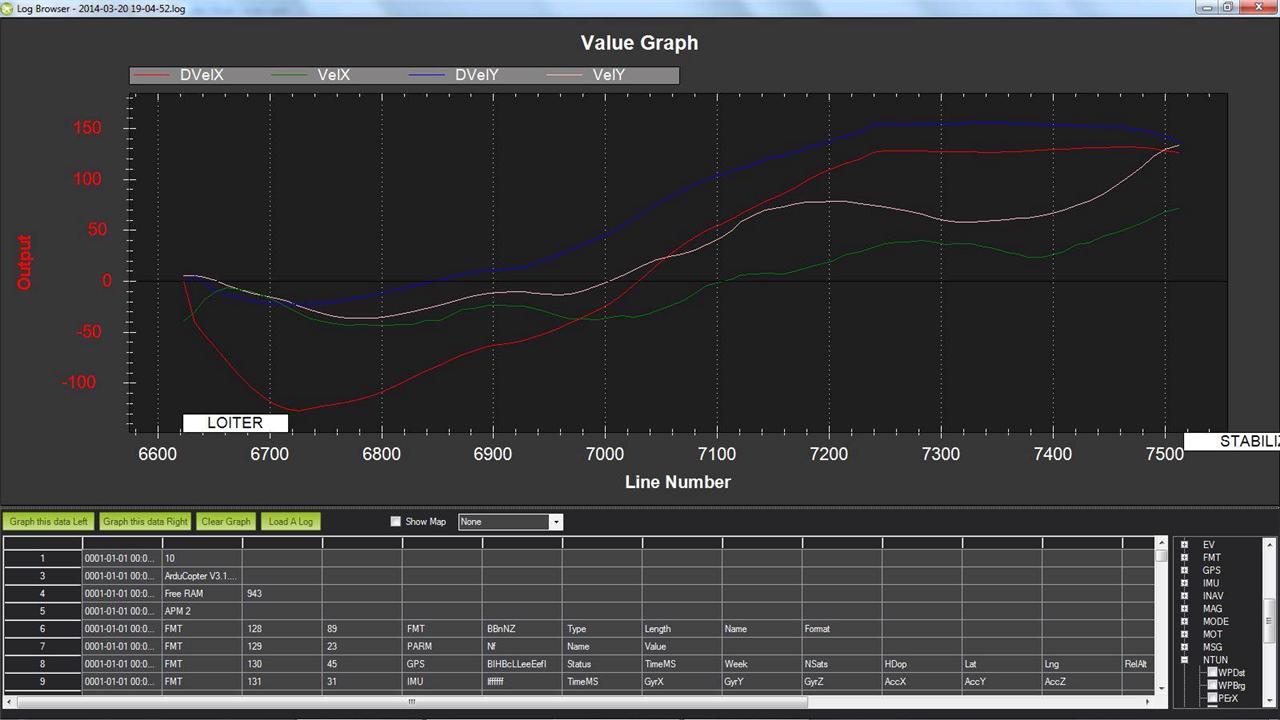
Ran the data flash log to see how loiter is performing and as expected, it is not working…
the graph is all over the place.
VelX (actual velocities) is not tracking DVelX (desired velocities)…same thing for Y
(I wish I had the problem some are having with the toilet-ball effect in loiter because that means I am in the zone and loiter is working but I have not had the pleasure yet to hold my aircraft in an auto position)
What else I am missing? I believe I ran all the tests and calibrations…but I must be missing something!!!
I am out of options, can someone help me? I sincerely appreciate your time.
Below is the “Loiter Performance” graph looking pretty bad, 2 pairs of lines should be practically on top of each other (parallel)
http://img.auctiva.com/imgdata/1/7/7/5/9/8/2/webimg/745356982_o.jpg

{kind=link}