Greetings! Need Help…
I have a problem with my hexacopter, I am using a Pixhawk 2.4.8. The problem is when I use the “Loter” mode, the hexacopter does not maintain the position, it makes oscillations.
6 sats and an Hdop >1 is insufficient for positional accuracy.
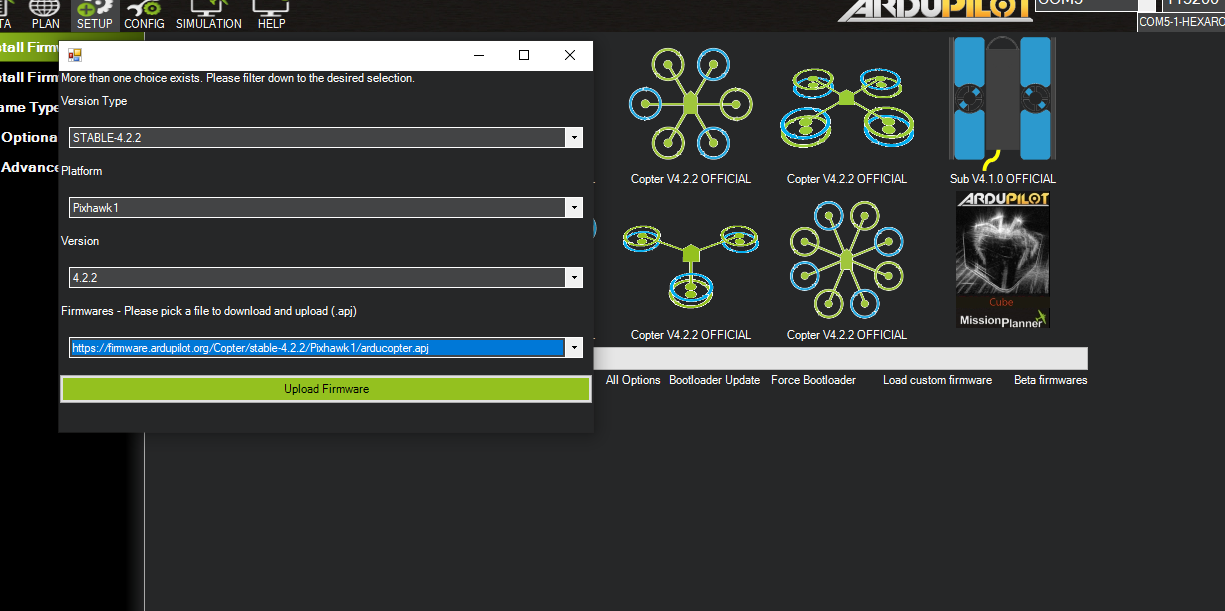
Update to latest Stable Arcucopter and use Pixhawl1 not fmuv3.
Use the Initial Parameter Setup page in Mission Planner for base configuration.
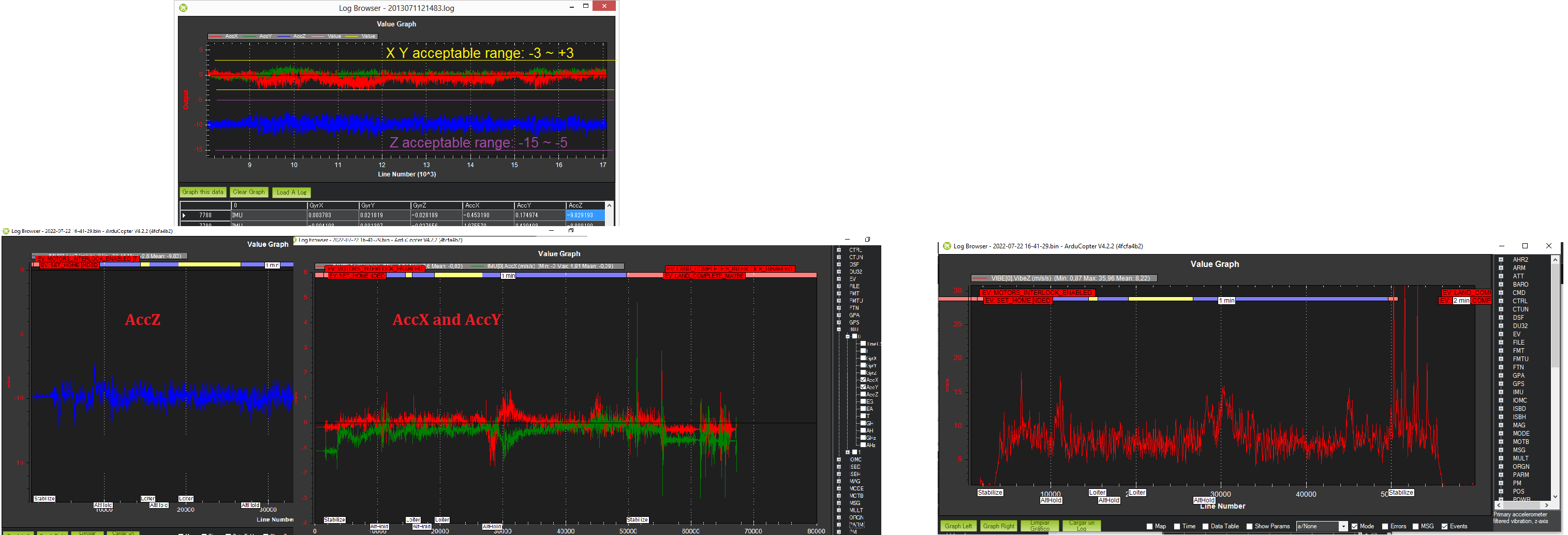
Your Z-vibrations are too high.
After fixing the vibe levels configure the Dynamic Notch filter.
Then run Auto tune.
Hello, I have continued with my project but I cannot get my drone to stabilize in loiter mode, I have reduced the vibrations, configured the dynamic filter and number SATELLITE more 12. In my opinion, everything is within the range that ardupilot recommends.
Note: When going to loiter mode my drone oscillates between the position, it’s like it’s looking for the point defined by the GPS, while doing this process the oscillation gets bigger.
You skipped the most important step before making a maiden flight and are flying on default parameters. It’s called the Initial Parameters Setup and not surprisingly can be found in Mandatory Hardware of Mission Planner.
And you should update to Pixhawk1 firmware but that’s been covered.
It’s more important to set the Initial Setup Parameters but going forward you want Pixhawk1. That link may been written before there was a Pixhawk1 version of firmware.
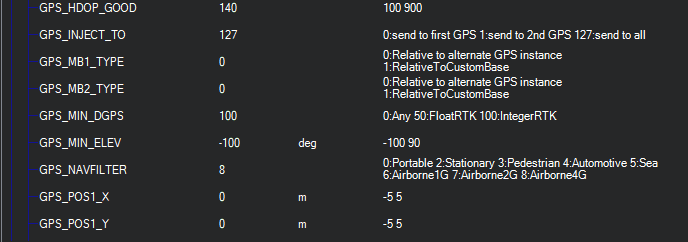
Hello everyone, I have configured my drone again and flew it, the result was that it still had oscillations in loiter mode. After reviewing the configurations, I noticed that GPS_NAVFILTER had a value of 3. I remembered that in APM 2.8 it worked correctly that way, so I set that value. Then I changed the value to 8 (Default) and the drone worked better, achieving better stability. My question is, what value should I set?