Greetings from France to all you ArduCopter wizards!
On my first flight with a replaced Pixhawk2 I experienced a couple issues that I’d love to get solutions for.
Summary:
- Tarot 650 + PH2 + M8N + GoPro Gimbal
- Short flight in steady, normal wind
- Primary objective: Check if flyable & GPS working (lots of resoldered cables)
- Secondary objective: PID Autotune
Course of Flight:
- Behaved fairly sluggishly, but was controlable
- Hover throttle too high, reset MOT_THST_HOVER from .35 to .5 which improved it
- Switched to AltHold, good results
- Switched to Loiter, copter immediately took off to the right until I switched back to AltHold
- Hood came off, hit propeller, hit Rx antenna, pushed Rx antenna into prop, one Rx antenna cut off
- Tried to land, touched down, forgot I was in AltHold. Thrust didn’t decrease quickly enough, wind blew it into some high grass where it auto-disarmed
- Had to call it a day, didn’t want to risk flying with one Rx antenna. Therefore didn’t AutoTune.
LogAnalyzer:
Size (kb) 4423.6962890625
No of lines 50632
Duration 0:02:42
Vehicletype ArduCopter
Firmware Version V3.5.0-rc5
Firmware Hash f070a8d0
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = GOOD - No MAG data, unable to test mag_field interference
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: CRASH
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.37, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = FAIL - Motor channel averages = [1787, 1749, 1542, 1516]
Average motor output = 1648
Difference between min and max motor averages = 271
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data
Issues:
- Loiter mode lets quad take off to the right
- Plugs for hood don’t work well (I’ll try some bobby pins next time)
- CoG seems off due to gimbal (Motor Balance off even though ESCs are calibrated)
- There seems to be a mag issue. I have the compass inside the M8N activated, also compass 2 (internal on PH2)
- Motor Balance: Could that be due to a bad CoG from the gimbal?
I uploaded the .bin and two .tlogs (I’m not sure which one is the correct one)
I would very much appreciate if someone would take a quick look and tell me if there are additional issues or what the reasons for the ones listed above could be.
Thank you very much in advance!

 2017-06-10 17-49-27.bin (1.9 MB)
2017-06-10 17-49-27.bin (1.9 MB)
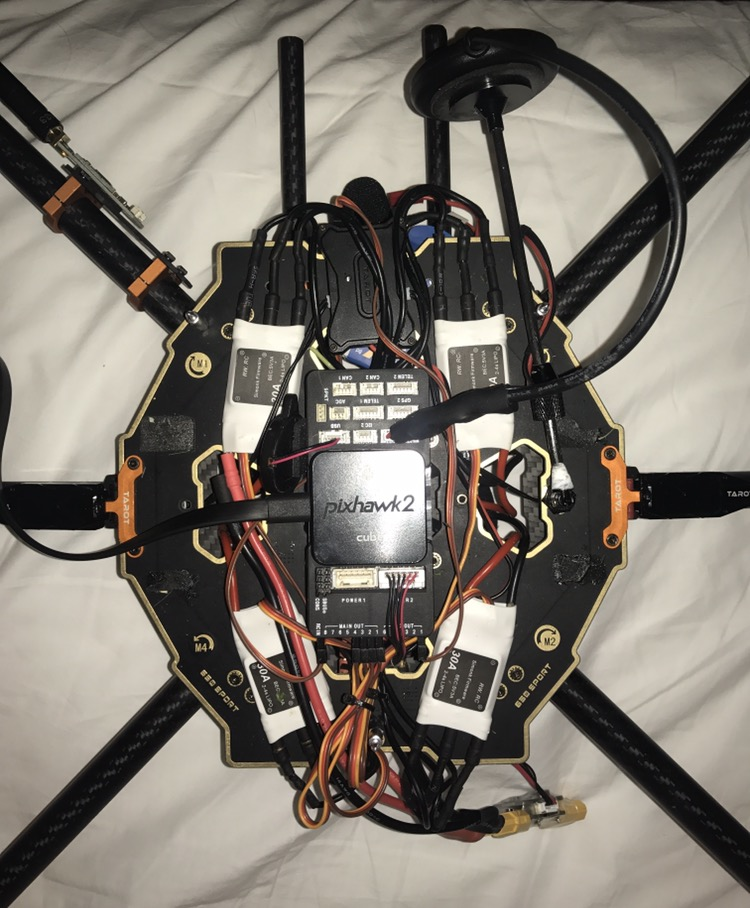
Pictures of Setup: