Did it many times, using Mission Planner and Tower Beta (Internal calibration)
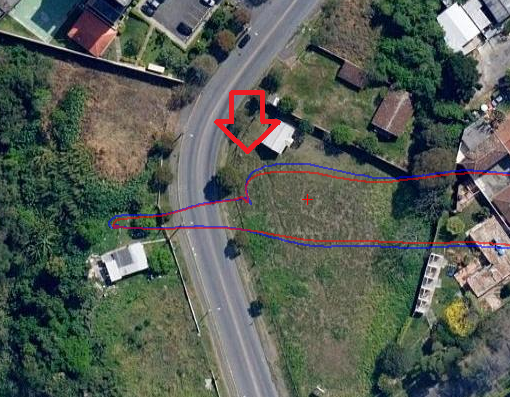
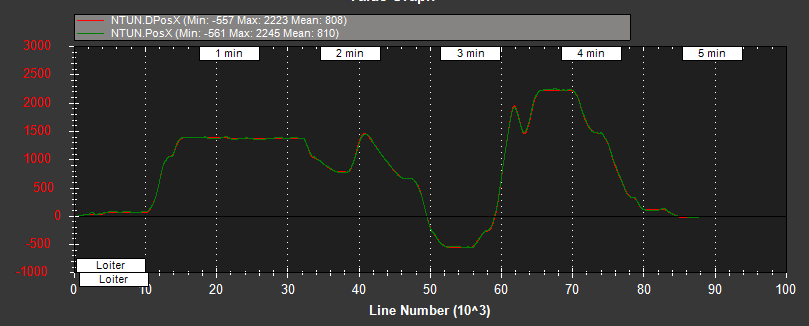
If you see the logs the GPS is healthy, reporting the actual position (that doesn’t match the desired position (DPosX vs PosX)), like if the loiter pids are crazy or something like this
I have been looking at your log to work out what is happening. So far I can see position errors up to 2.5 m. This isn’t good but it also isn’t 5m so I am wondering how accurate the GPS is.
How much wind was there during this flight?
Velocity control didn’t seem to be obviously a problem. Again, not great but not terrible either.
Same with your attitude control.
I don’t see anything that seems to match the description of 5m drift and sudden correction.
Vibrations aren’t great but nothing bad either.
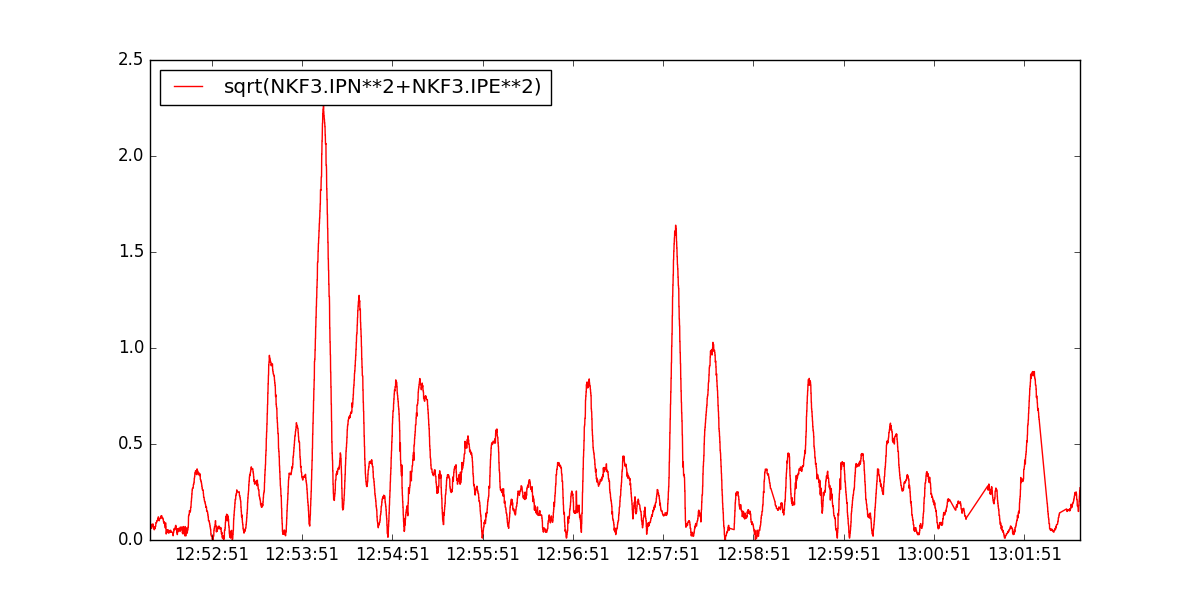
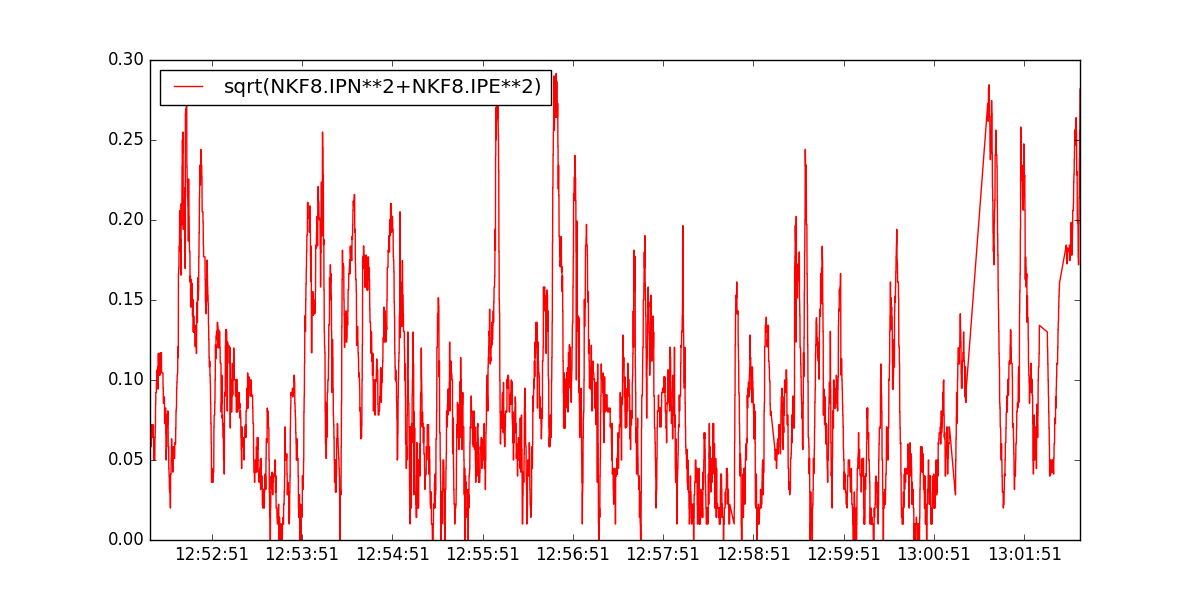
The EKF seems to have high innovations but I am not overly familiar with the new logging of the EKF. The high innovations (when the EKF says the sensor readings don’t make as much sense) also correspond to where the position deviation happens. This suggests that this is some combination of GPS and accelerometer errors.
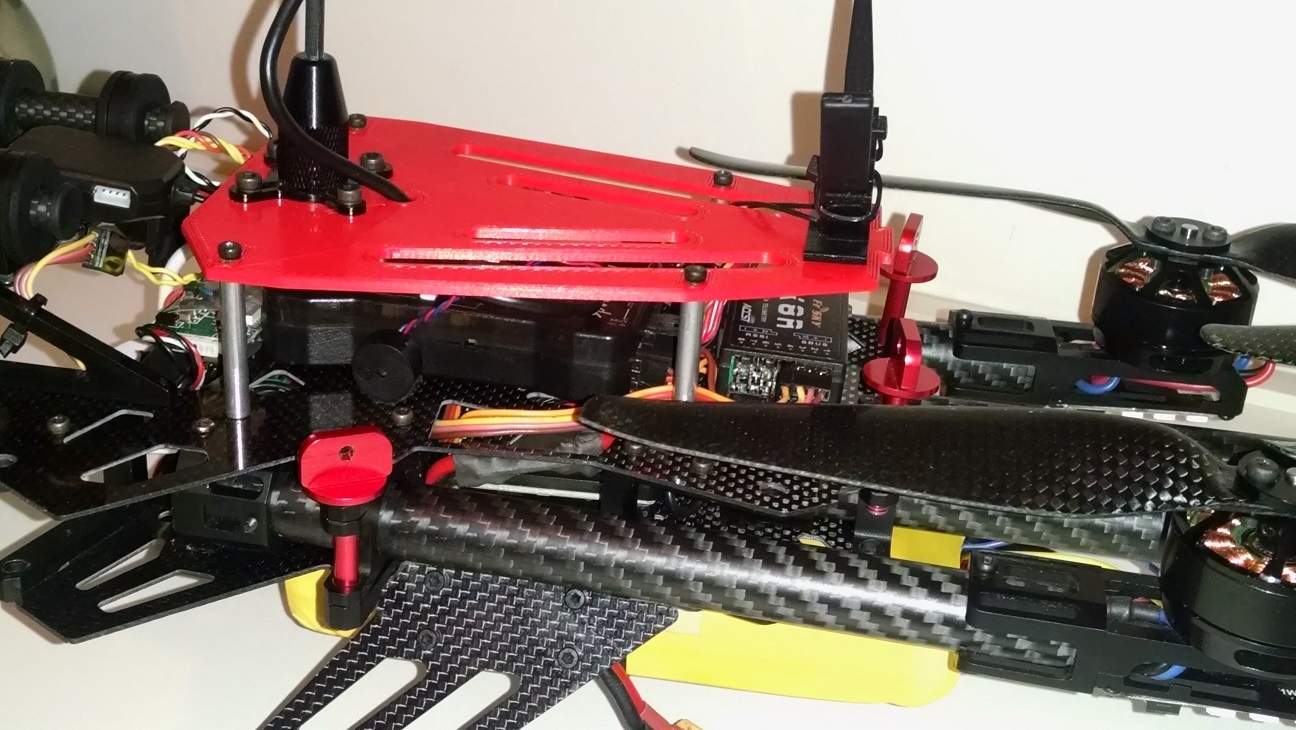
Can you provide some photos of the frame and the autopilot mounting.
In both of your logs, IMU 1 is performing very poorly, IMU 2 is performing ok. ArduPilot perhaps does not switch between IMUs as dynamically as it should, but ultimately there is a hardware issue.
Have more details on the autopilot in use?
Note that the position errors are 2.5 meters, not 5 meters.
Nice findings. I don’t have much details about this clone, bought a couple months ago from Aliexpress. It’s supposed to be a 2.4.6 board
Until a new board arrives, could I use EK2_IMU_MASK = 2 to use only the IMU2? Will those drifts go away/be less frequent?
Is there anything on the quad I could change to reduce this behaviour? Vibrations are withing the acceptable range on both IMUS (-1 ~ +1 on the worst case/IMU)