Hello all!
Im trying to study quadrotor dynamics, control and etc. I have quadrotor with ArduCopter 3.3 and Mission Planner 1.3.33. Getting dataflash logs via MP and making MATLAB files makes me possible to study for example roll angle. So I can see next figures:
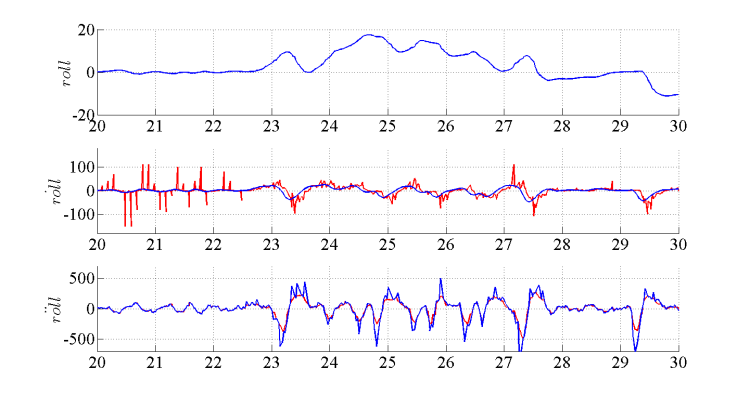
Red plots – numerical differentiation of previous primitives and blue plots – data from logs, but in case of dot(roll) it is multiplied by 50 and in case of ddot(roll) is multiplied by 2500.
So I have next question: what data is real and why?
Thank you in advance for your reply and I will give all the necessary information to answer.