Hello all, I wanted to open this topic because I have the feeling that I am not really good reading Logs and I want to learn.
I am able to open logs and see things, like the rpm of each motors vs time, voltage of the battery and so on…
However, some of you are really good providing diagnosis to problems taking a look to the logs and I am not able yet to extract that many information.
For example, I was testing a 6 inch quad that uses Ardupilot inside of a hangar, it was flying for 6 min until it made a rare movement in yaw, started yawing like crazy and fell. I attach the log file. Could somebody please help me to diagnose what was the problem and into what should I take a look in order to figure it out?
The file that begins in 90 is the one where the drone started to do weird yaw things after 6 min, and then I flew it again for few minutes until it did it again.
The file that begins in 97, is another testing that I did last week. I placed 1 pound payload under the drone and flew it. After 4 mins of flight the drone just fell from the sky. Looked like a failsafe, but it was not.
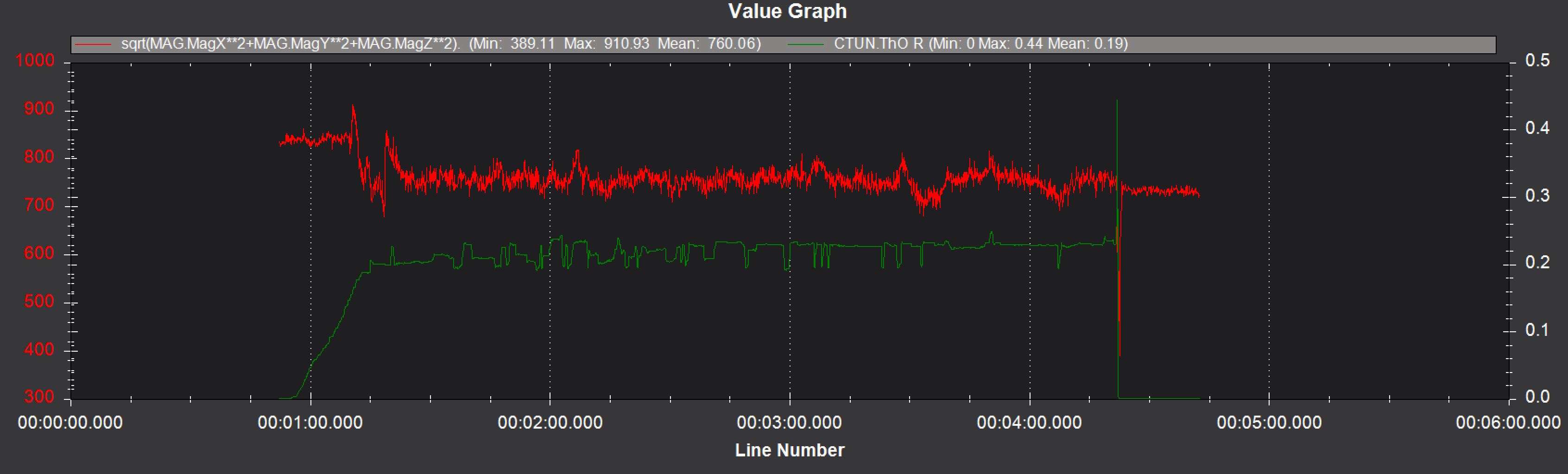
Check your compass, the innovation of yaw is very high which means the correction source which seems to be the compass is not working properly. It may be due to the magnetic field of your motors or power supply or to something external. It usually helps to calibrate the compass with motors, COMPASS_MOT or to place an external one on a stick far from the electronics and calibrate:
Good point, it may be something external. There are high sudden changes in the magnetic field readings which look correlated with a high innovation. Under that scenario a compass_mot calibration will not solve anything.
This Copter category is for 4.1 beta testing. No big deal of course but to separate the beta testing reports from regular reports we have different categories. I’ve changed the category of this discussion to Copter-4.0. txs.
Thank you all for the assistance and help. It is being very useful. I changed the Flight controller into another frame with different ESC and motors. They are the same parts but different units. So to explain myself, I took the brain of the drone and put it in a another drone of the same class. The yawing fail that made it crash after 6 min of flight is gone.
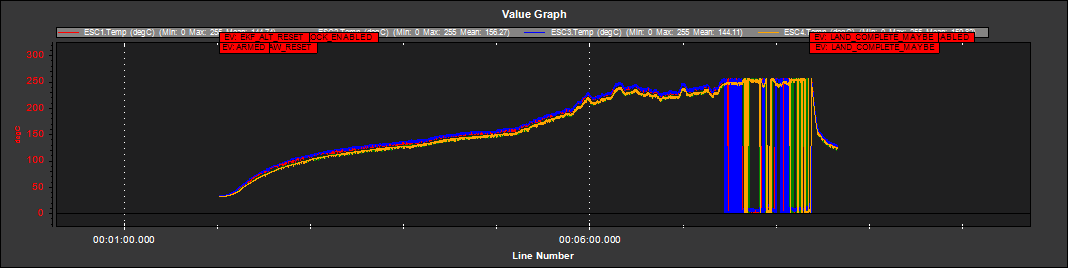
I think I have discovered why now the ESC shuts down after 3-4 min of fly time. I saw the ESC Temperature goes really high. I disactivated the Temperature protection with the BLheli 32 assistant, but I think if u go above 260 C or so it shuts down. It is a T motor f55 mini. Today I could finish the battery with no problem, think because I tried early in the morning and the ambient T was lower.
Select in the Mission planner NKF3.IYAW and MAG.MAGX. Usually, I would focus on MAGZ, but when there is a source of magnetic field, it is detected in the three of them (including MAGY).
I meant how do you get such a clear and tidy graph. In my case, when I review the logs with Mission Planner, when I try to display the event, modes, messages and error, they all appear all together one on top of others and I have to zoom specific zones if I want to be able to read something.