https://drive.google.com/open?id=1OCpxBeIXyR5Z1atvFhukyF6h2CbGoLYV
The octo don’t kept the nose to the grid line.
Thanks for the help
https://drive.google.com/open?id=1OCpxBeIXyR5Z1atvFhukyF6h2CbGoLYV
The octo don’t kept the nose to the grid line.
Thanks for the help
Hi. Can you please tell us exactly what behavior you want? I can make a few suggestions, but I am not sure if any of these will do what you want:
If you want the drone to keep the nose pointed along the flight path, the parameter WP_YAW_BEHAVIOR = 1 will make the drone face the next waypoint so it will stay aligned with the grid.
You can use the mission command CONDITION_YAW to manually set the desired heading for the aircraft.
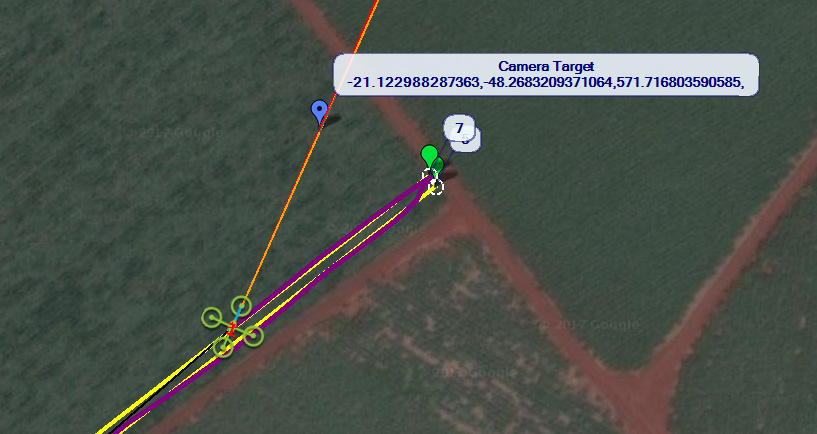
In the second half of your flight, your copter was turning to face a camera target:
But you did not specify if this behavior was intentional. This can be triggered by the command DO_SET_ROI or by right clicking on the map in Mission Planner/GCS and selecting “Point Camera Here.”
Thanks for the fast reply…
The behavior that i expected was heading to next waypoint and it started the mission heading to North (i don’t know why).
Value Meaning
0 Never change yaw
1 Face next waypoint
2 Face next waypoint except RTL
3 Face along GPS course
(I think i’ll use one of them “1 or 3”)
That camera target wasn’t intentional… And i don’t know why it was there…
Thanks…