Hello everyone!
Unfortunately, I had a bad crash with this scenario: the Hexacopter flew about 80 meters in ALTHOLD mode. After some hovering, all the motors immediately stopped and the Hexacopter started to freefall. At around 30 meters from the ground, the motors started spinning at full throttle (as said by the pilot), but due to the speed of the descent, the Hexacopter hit the ground.
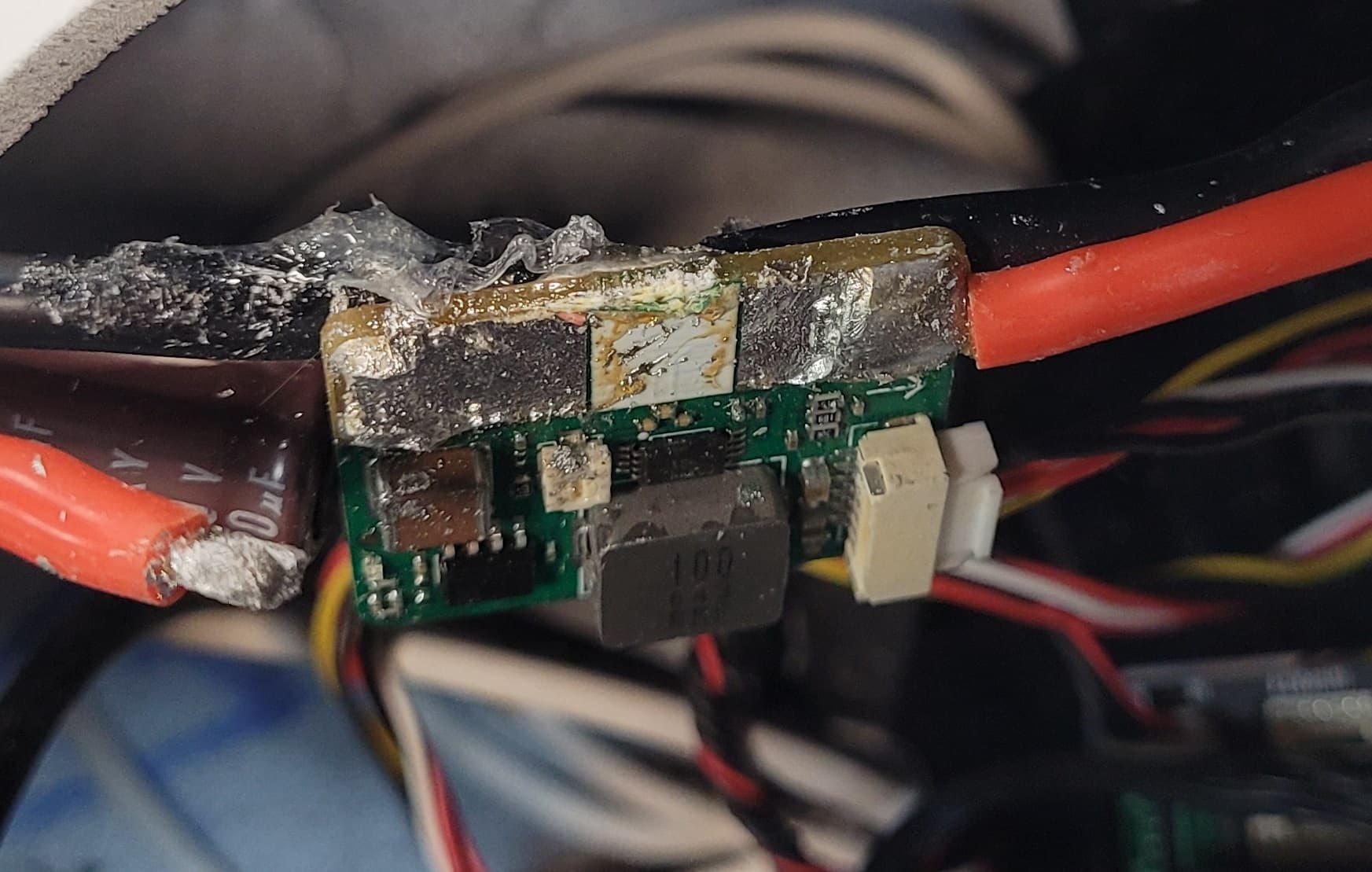
After the investigations, we realized that the main possibility was the improper selection of the power module, which caused the main power to be cut off. The image below shows this
Our problem is with the log. Why was there no log saved just after the freefall? The Hexacopter was at 30 meters and attempting to regain control, but there is no record in the log. If the Pixhawk powered off at 80 meters and did not save logs, how could it have powered on again at 30 meters and attempted to control the Hexacopter? Is this possible?
If the autopilot resets during flight, is there a mode in Ardopilot that detects this fault and immediately turns on the motors?
There is no evidence of the flight controller powering up again, and I highly doubt it would be able to since in your picture it is the battery lead that has become unsoldered and the shunt resistor is gone.
Maybe it just appeared try to stabilise because of wind turning the props - unsure
If the flight controller had locked up then there would be evidence of a watchdog reset once you turned it back on, but I doubt any of that happened. Even if it reset in-flight it still needs to go through the arming procedure.
The only exception is if you switched to Motor Emergency Stop - you can switch out of that and the copter continues to fly, or at least attempts to.
Anyway, you will need a Mauch voltage and current sensor and BEC - or at least something similar.
I only mentioned Motor Emergency Stop as an example that it is possible for motors to stop then restart in flight - but I cant think of any other way that would happen. There is clearly nothing recorded by the flight controller. Normally you would get a new log and there is the arming process to go through.
The only other possibility I can think of is the rotating props (because the copter fell from very high) caused enough voltage to be generated that the ESCs started doing something strange - even though they probably should not.