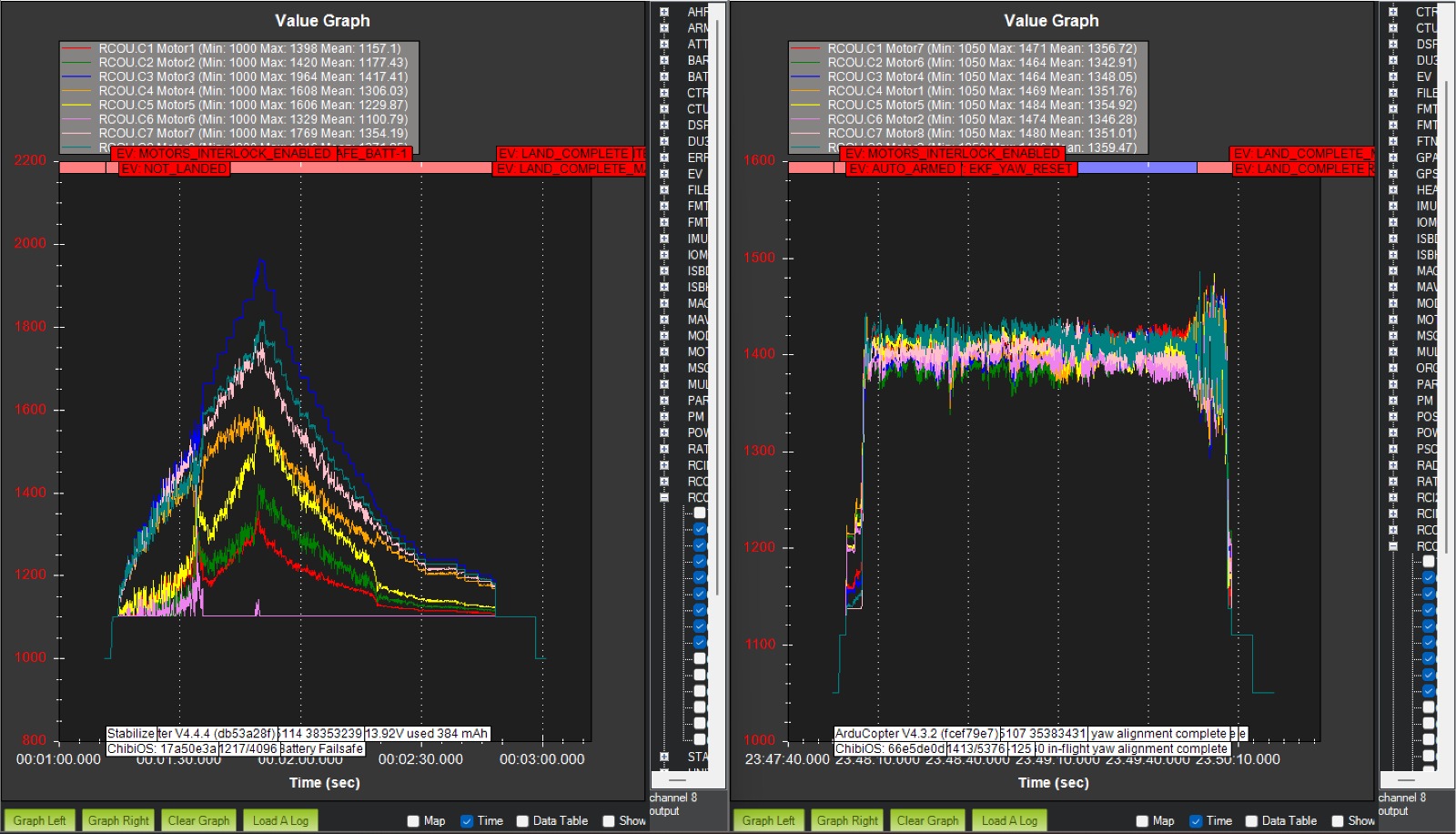
Did this actually leave the ground?
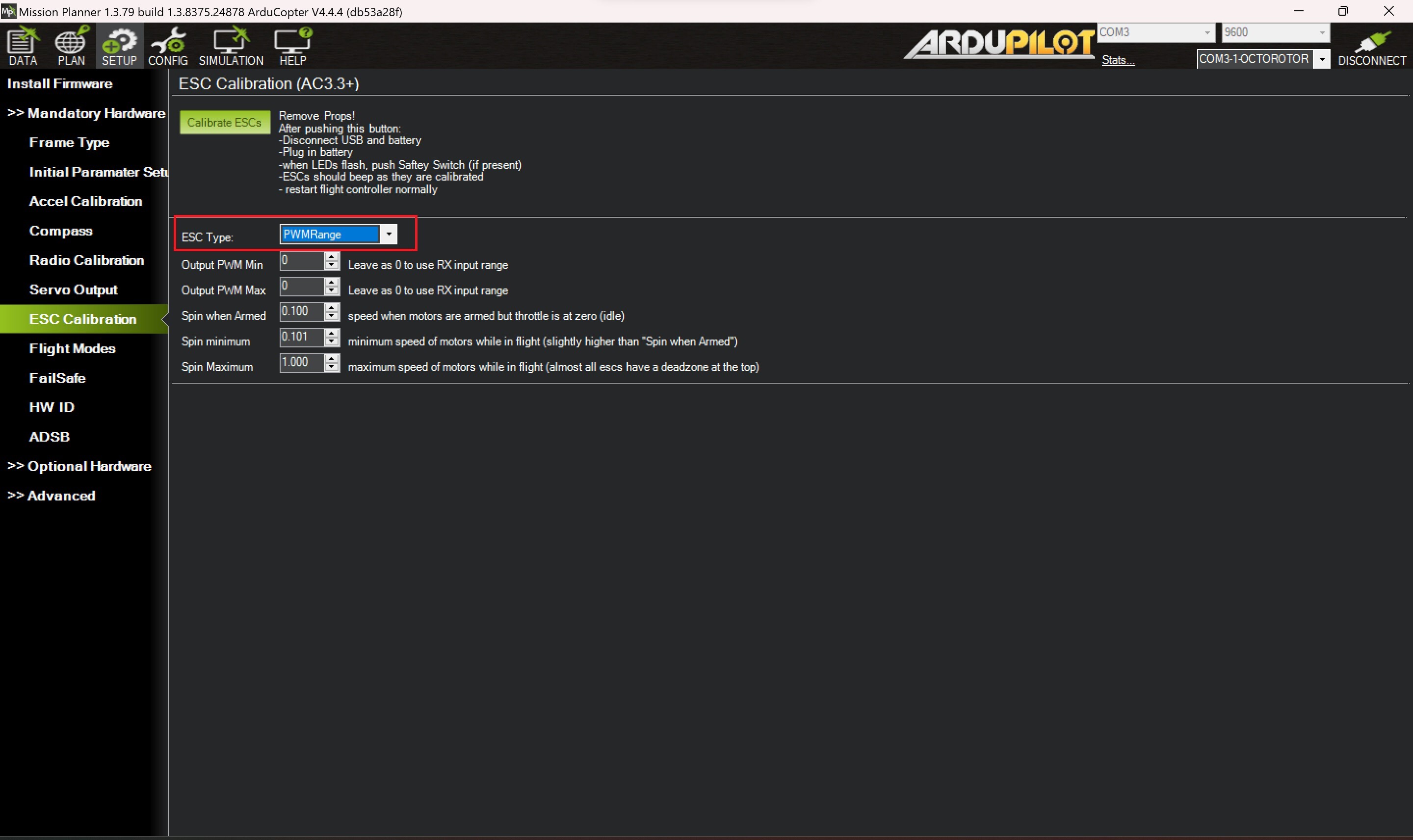
You have Dshot600 configured on the main outputs. While this might work if you use V4.5 and configure correctly clearly it’s not working now so set it to PWM:
Note: Even if you do load firmware that supports Dshot on the IOMCU it won’t for long as it’s likely to be deleted for Pixhawk1-1M.
No, it did not leave the ground, I’m not sure what you mean by RCOut:PWM 1-14 ? And what is V4.5?
As well, when doing an ESC calibration, no matter if i calibrate for ‘Dshot600’ or for ‘Dshot150’ or for ‘Normal’, the ESCs do not go through the beep&light calibration sequence. But when its calibrated for ‘Dshot 150’ or ‘Dshot 600’, at least the FC LED will turn blue and the drone will arm and turn the props, but when doing an ESC calibration for ‘Normal’, the FC stays on yellow LED and the drone won’t even arm.
All the troubles i’m having lately, where that 1 motor out of 8 moves visibly slower than the other motors, started after i made the following change:
Switching the 10 years old supposedly not high quality BL40A ESCs:
Your ESCs are PWM, not running dshot. At that age, they are likely not dshot compatible. At least not up to date. Either way, based on what Dave showed you, the ESCs are only working in PWM mode so none of the Dshot settings will do anything.
V4.5 is the beta version of Arducopter. Current stable is 4.4.4.
Testing motor outputs like that on the ground is pointless. The only motor test that really means anything is the MP motor test. When the drone is on the ground the PID loop is confused because the drone isn’t moving based on it’s commands so motors will do … who knows what. Sure, it’s fun to do, but it doesn’t tell you anything.
Then the graph you showed is irrelevant.
You need to configure MOT_PWM_TYPE as normal (0) and calibrate using the semi-automatic method (the old way). Even if those ESC’s supported Dhsot (they don’t) that would not work on the Main outputs of that flight controller.
Can you refer me to a link that will explain if the way I’m trying to calibrate the ESCs now is the new automatic method or the old semi automatic method?
I’ve been having issues with recalibrating my ESCs.
I tried the link above you provided, but from my understanding each ESC manufaturer creates their own ESC calibration protocol.
I’ve also tried MOT_PWM_TYPE, normal, as well as Dshot, but still no calibration beepi&light sequence.
The thing is, I can’t seem to locate the calibration protocol for my APD ESCs, and I’m unable to get my ESCs to calibrate, if you could direct me
to the exact APD protocol or you know the correct protocol, it would be much appreciated.
Those APD ESC’s support Dshot but you cannot use that protocol with that flight controller because the main outputs do not support Dshot and there are not enough Aux outputs for an X8. So, you have to configure them as PWM.
MOT_PWM_TYPE,0
The semi-automatic method should work for calibration. But who says you have a problem anyway? We have already addressed why your test was meaningless relative to a slow turning motor.
Is the RC throttle position important when executing a semi automatic calibration?
If throttle position does matter and there is a problem of minimum throttle μs, then perhaps this situation prevents executing an ESC calibration?
I think there is a minimum throttle μs problem with the APD ESCs, since when lowering the throttle from minimum rpm to 0 rpm, after the props stop turning, the ESCs beep at a sequence that indicates minimum throttle is too high (although arming is possible and before arming there is no such beep sequence).
Here are 2 parameter tree files, one from Feb-28-2024 (28-2-24) which enables to arm the drone and spin the motors, the other from today (4-3-24) was saved after executing a radio calibration and then the APD ESCs give a 6 beep sequence, which means that the lower end point is too high and the drone won’t arm.
In any case, also with the parameter file that enables to arm and spin the motors, the radio calibration page in Mission Planner shows a minimum throttle of 1090 uS, which is above the 1000-1020 uS that APD claim should be the minimum throttle output, in order to be able to arm the drone.
Can you help me understand the differences between the 2 parameter tree files and the reasons these difference enables and disable to arm the drone and spin the motors?
The only difference between those 2 that would make any difference is the 28-2-24 is configiured for Dshot600 and the other one is configured for PWMrange. Neither is correct. As I said you have to use PWM (MOT_PWM_TYPE,0) with that Flight Controller for an X8.
It wouldn’t be a bad idea to scrap that ancient Flight Controller.
If parameter tree is set to MOT_PWM_TYPE,0 what should i expect to see in Mission Planner calibration page drop down?
I’m asking since i did try more than once to change MOT_PWM_TYPE to 0 in parameter tree and on the calibration page drop down it changed as a result to PWMrange or am i recalling wrong? What should the drop down show after the change in the parameter tree?
As well, if all motors seem to start and stop together and spin at the same speed at low % and at high % when executing a motor test, is this an indication that calibration was successful?
Regardless of what it says use the pull-down menu to set it to Normal.
This was what I was getting at before. Your bench test with the controller was invalid, Mission planners Motor is the right way. Why don’t you just advance with the configuration and tuning.