I would like to ask for help in discovering what could have caused the sudden instability of the copter after several minutes of quiet hovering. Later starts ended with the same instability. Don’t look at the FC amps - it’s not calibrated yet. The compass has not yet been properly calibrated outside (very cold). Kopter is in initial setup but still before Autotun.
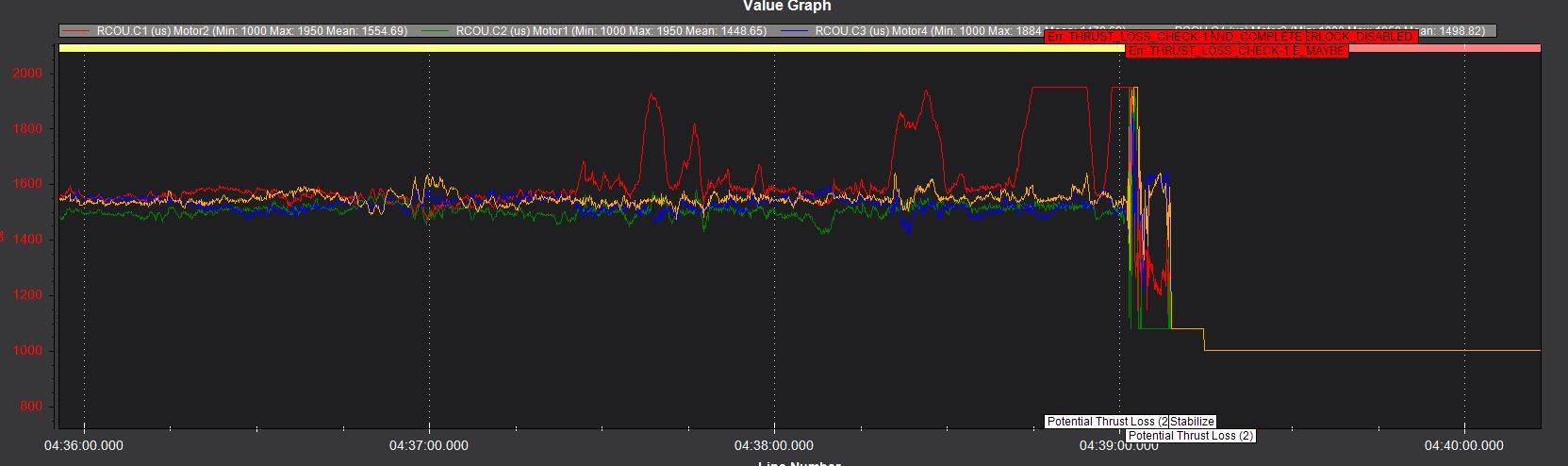
Very odd looking commanded output on C1 (your Motor 2). This usually would indicate a loss of thrust but then the opposite Motor is dropped to compensate/stabilize. That behavior is not seen here:
If all the BLHELI settings are the same in every ESC, then I’d be checking physical connections very carefully.
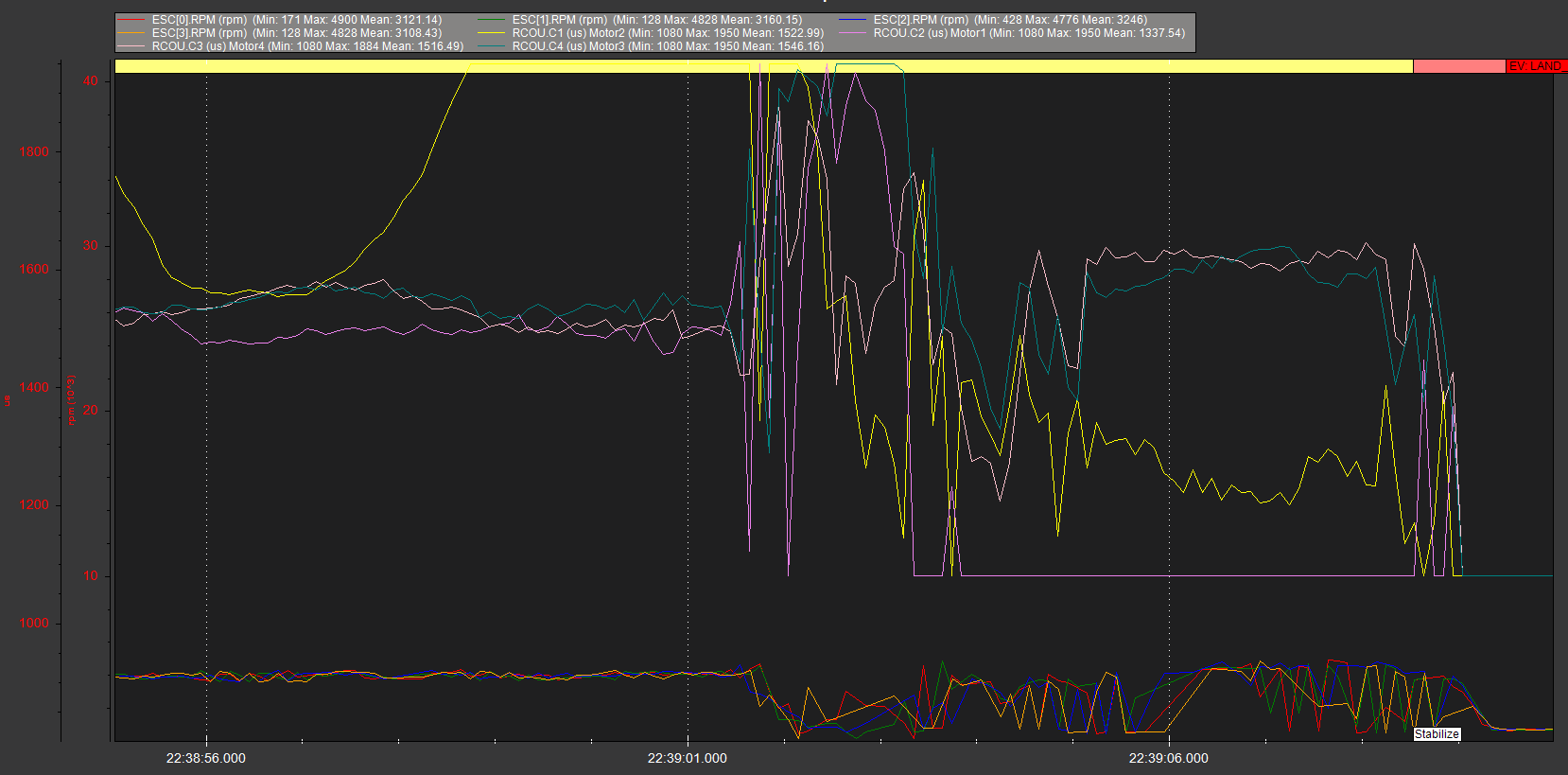
The high commanded output as shown by Dave is not reflected in the motor/ESC RPM, which is more strangeness, at least not until the end where lots of things deviate, and battery voltage is getting quite low.
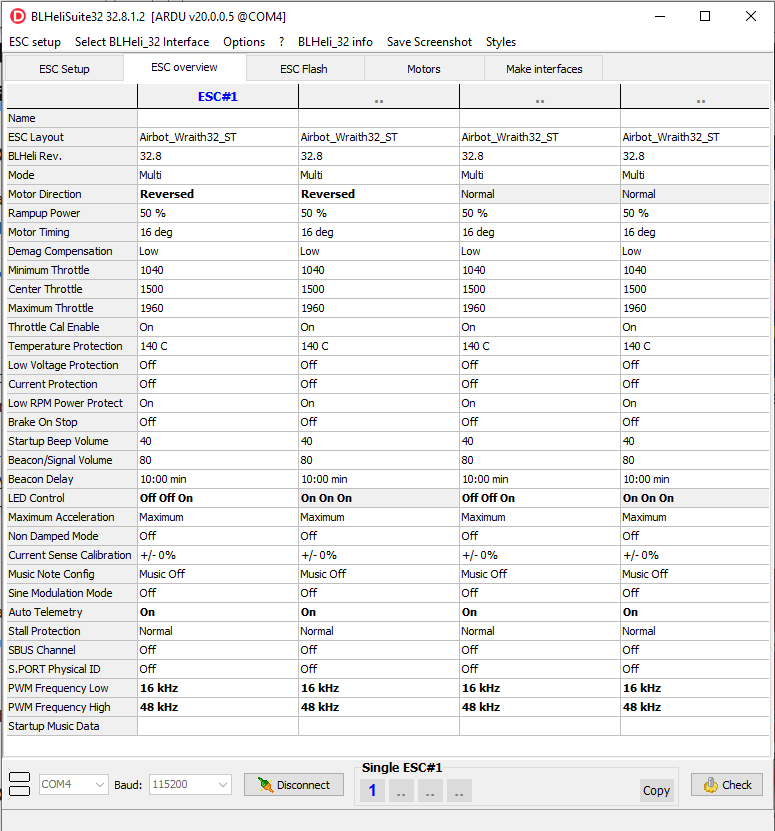
I would check the BLHELI settings and make sure you have these:
Low Voltage Protection OFF
Low RPM Power Protect OFF
and set these Arducopter params exactly, a couple of yours are a bit off:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
BATT_ARM_VOLT,12.70
BATT_CRT_VOLT,12.00
BATT_LOW_VOLT,12.40
MOT_BAT_VOLT_MAX,16.40
MOT_BAT_VOLT_MIN,11.20
Ensure the voltage monitor is accurate, especially at the lower range of voltages.
As for the Batt Failsafe settings, I will leave as I have, I only fly in a wild environment, I cannot let the drone enter automatic landing, I want to have control all the way, the only exception is breaking the RC link.
Unfortunately during these instabilities I broke one 13x5 propeller. I still have 15x5.5 propellers - but they are a bit too big - the gimbal goes under the propellers. It should be enough to check the essence of the problem.
I will adjust the voltmeter, check and organize the wiring.
I corrected the MOT_BAT_VOLT_MAX / MIN parameters.
I will try other batteries to exclude current fluctuations that may result from a damaged cell … I use the INR21700-40t (40t3) cell, the latest Samsung product. I’ve never had a problem with them on drones or airplanes, we’ll see.
After the tests, I will let you know how it went.
EDIT:
I am thinking aloud, could such instability be the result of ESC desynchronization?
Should i try to lower rumpup power and enable Auto Timing ?