Hello Everyone,
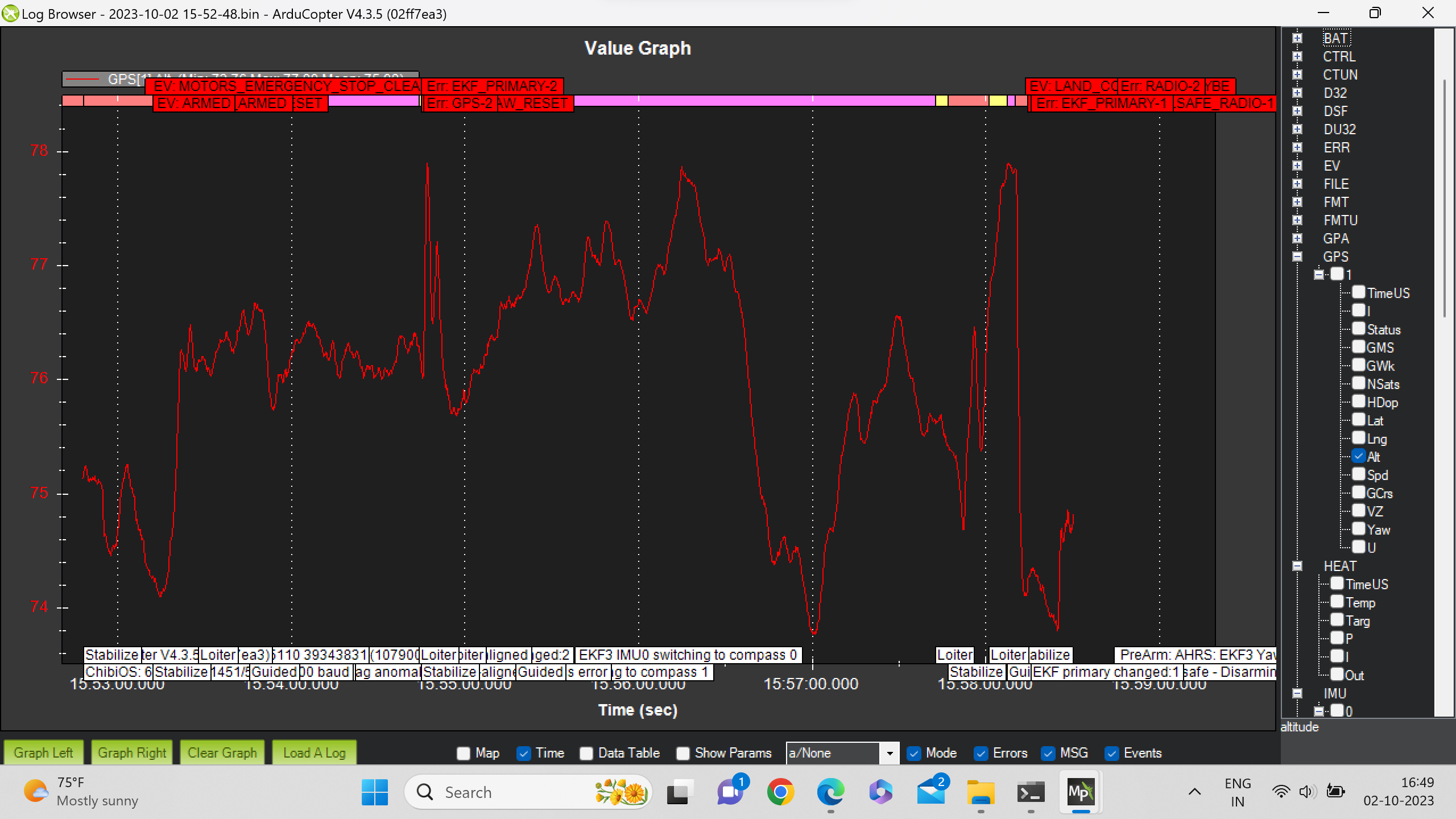
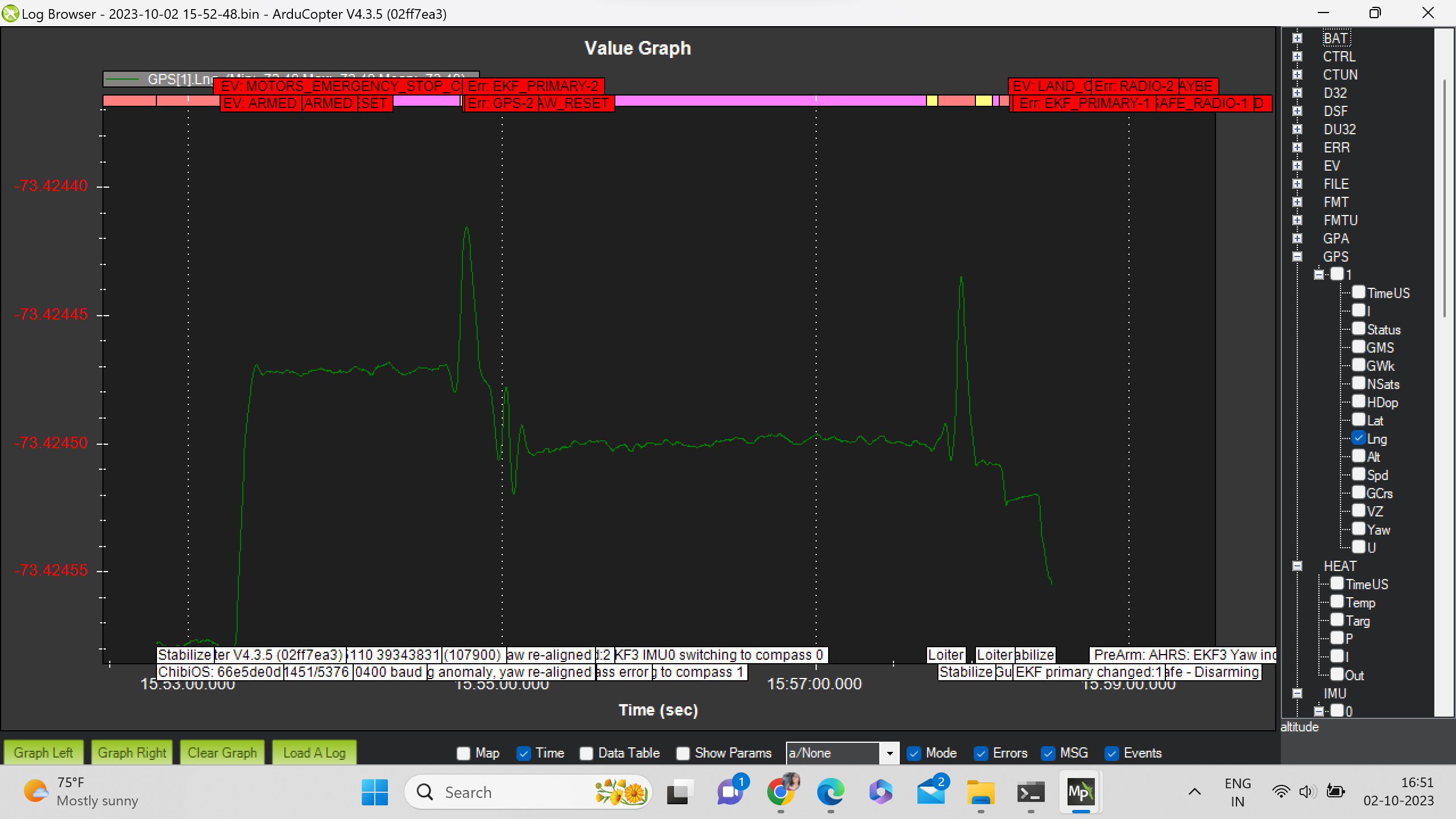
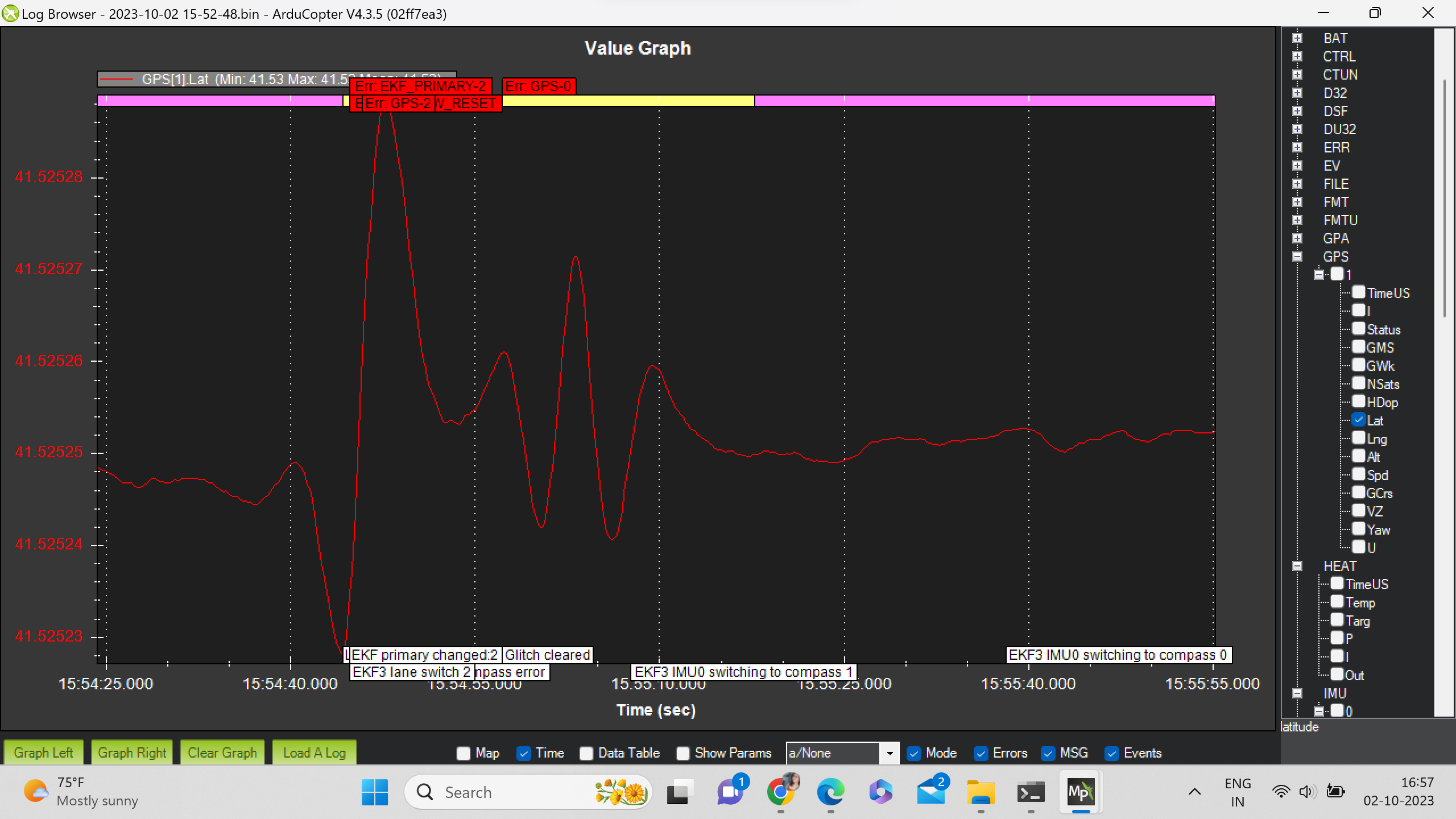
I need a little help in the log analysis of the flight which I did recently. This help would be much appreciated. I am very new to this log analysis and any advanced inputs from this would be great. These are my logs for lat lon and alt.
First, manually, I took my drone to specific heights and switched to loiter. After some time, I switched to guided(go 5 mts above a point and hold), it performed well and then we switched to loiter where the drone acted crazy for some time.
Also, when I checked the logs, I was getting compass errors and resetting the yaw (my drone was rotating unnecessarily sometimes during the flight).
What else can be rectified/improved of what we see in the logs other than compass calibration?
Install or setup a current meter. Run MagFit calibration for the compasses.
Unless you were facing a very consistent wind, I would say the quad is not balanced. The front motors were working harder for the duration of the flight.
I guess you ran Auto Tune w/o 1st configuring the notch filter and then manually changed Rate Pitch/Roll P&I to inadvisable values. P&I should typically be equal. For now set them both to 0.1
Set INS_ACCEL_FILTER,10
Read the Docs for setting these based on MOT_THST_HOVER:
PSC_ACCZ_I
PSC_ACCZ_P
Looks like you made some changes to some other PSC parameters. Where did that come from?