Hi @meee1,
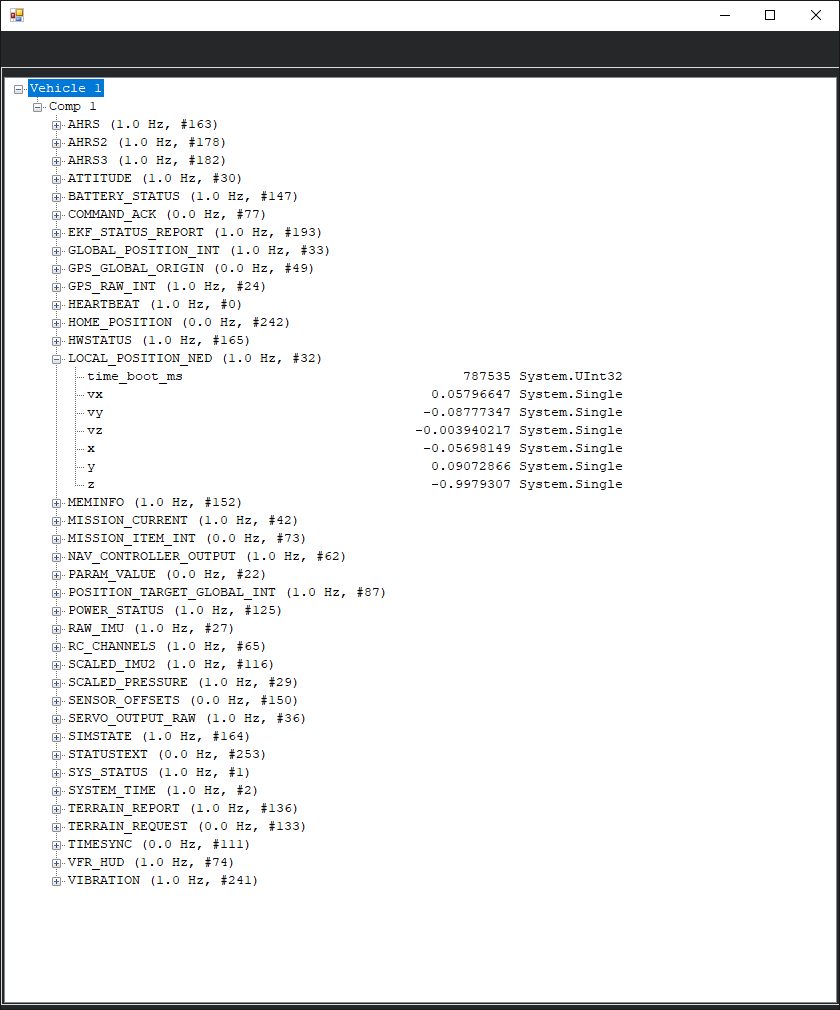
Is the message “LOCAL_POSITION_NED” (#32) handled in the Mission Planner?
Doron
MP can decode it, but currently does not do anything with it.
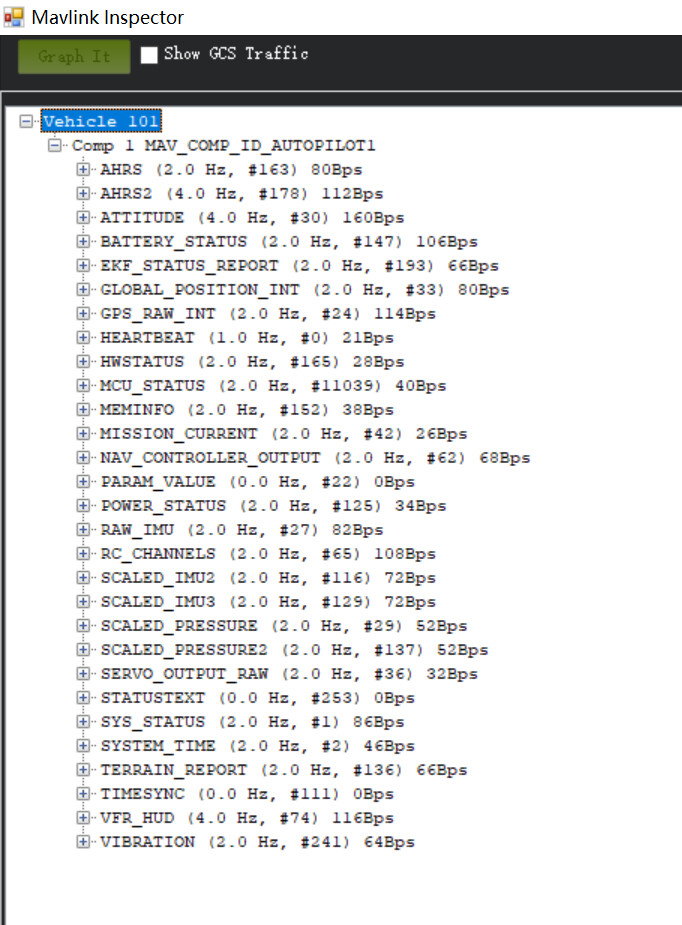
it can be viewed in the mavlink inspector.
what did you plan on doing with it?
I could add support for coord conversion around a origin, but at the moment nothing like this exists
Hi,
It’s just easier to debug the drone navigation while the position is given in NED.
if you use the mavlink inspector in MP you can view the details though (Control-F > Mavlink Inspector)
Thanks,
Another question about swarming (should I open a new topic)?
In the Mission Planner website it’s written the following sentence:
“More sophisticated swarming/multiple-UAV control is available in QGroundControl and APM Planner 2.0, which are both built on a multiple-vehicle architecture”.
Can you explain this sentence?
I’m interesting to develop a fleet management over GCS. Is mission planner is a good choice for this?
Doron
Set home point in mission planner could do this