I would like to ask for help in the assembly and setup of my A2 lidar with a pixhawk 2.1
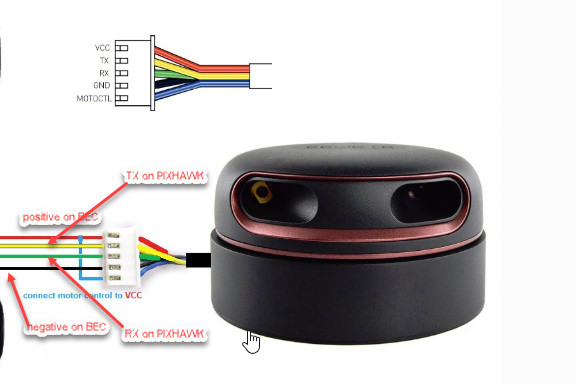
I have wired the following way to telemetry port 2
The parameters:
[SERIAL2_PROTOCOL] = “11”
[SERIAL2_BAUD]= “115”
[PRX_TYPE]= “5”
[PRX_ORIENT]= “0”
[BRD_SER2_RTSCTS]= “0”
But in Mission Planner’s proximity viewer there is no information there
I’m not sure if I did something wrong, do I have to arm before? and put in auto mode?
The lidar has power because the rotor turns perfect
You say the lidar he is using isn’t exactly the same as the one on the wiki. What is different? They both seem to be the same and I don’t see any model numbers.
Hello sir, I’ve had similar problems with many rplidar a2 units, let me tell you the setup that worked for me (at least to get readings). I used an external 5V BEC to power the lidar (you need to take out the red wire from the cable that connects to the flight controller).
Before flying you need to disconnect the BEC (power off the lidar). Power on the flight controller first and then power on the lidar (I don’t know why but it works half of the time), and eventually your lidar will work… until you notice how sensitive it is to sunlight, maybe you can find a way to block it. I’m not using it ever again, but hopefully you can make it work. Good luck!
I can second that; I got my A2 working with Ardurover 4.0; however, if the vehicle is powered on at the same time as the lidar, it will not work. I have to reboot the pixhawk after the lidar has been running for a short time, then it will work.