PRX1_ORIENT = “0” if mounted on the top of the vehicle, “1” if mounted upside-down on the bottom of the vehicle.
Here is a strange thing (maybe it is very silly but when things don’t work you look at everything). In ardurover 4.2.3 there is neither PRX1_TYPE nor PRX1_ORIENT… there is the PRX_TYPE and the PRX_ORIENT.
(PRX1_TYPE exist in 4.4.0 for example)
So I have used the parameters without the one.
SERIAL1_PROTOCOL = “11”
SERIAL1_BAUD = “115”
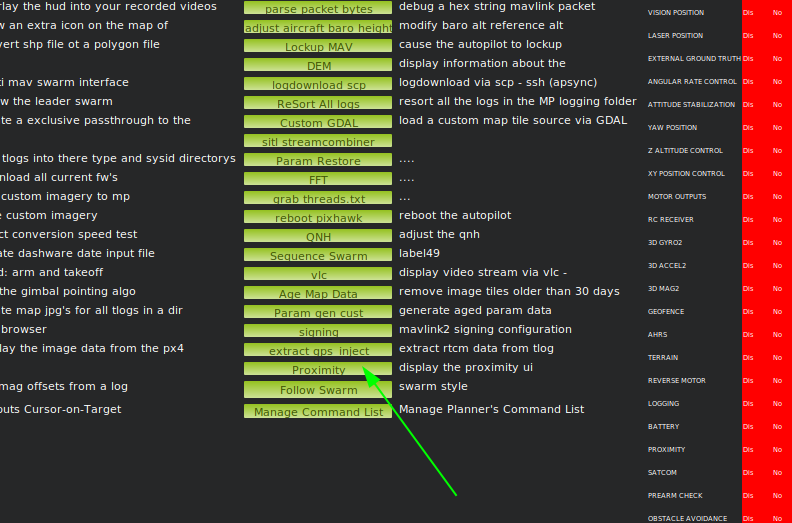
PRX_TYPE = “5”
PRX_ORIENT = “0”
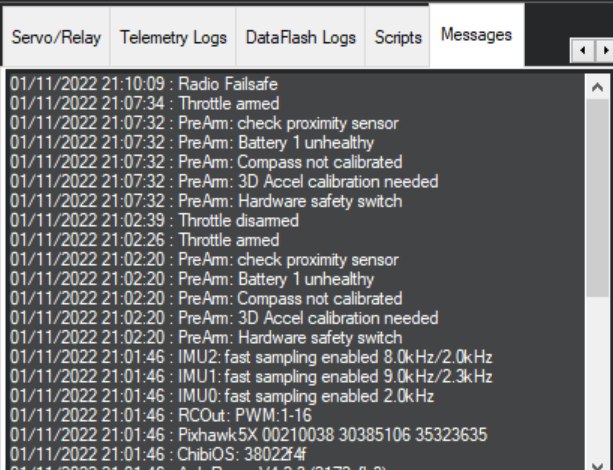
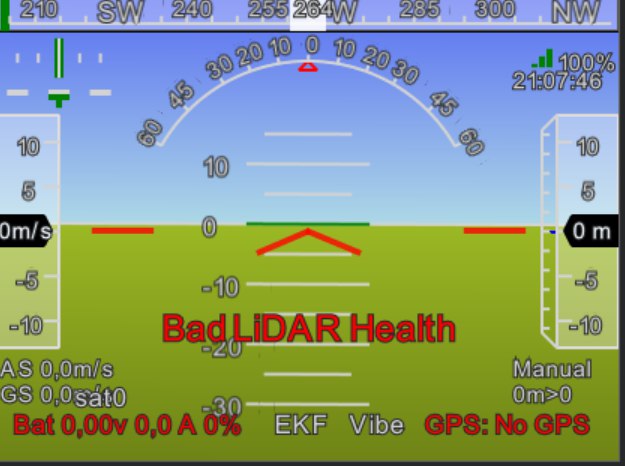
In mission planner before arm it says “PreArm: chech proximity sensor” and if I force it to arm anyway then it tells me “Bad LiDar Health”
I’m not an expert on rover or lidars for that matter. I’m using a downwards facing lidar on a multirotor, that’s it.
Although you should not be powering the lidar from the Pixhawk directly. This goes for basically all equipment on board. The only exception would be your receiver since it’s so low power and also the gps module that’s usually powered by the FC.
I power my lidar with a 5v BEC circuit and a rotating lidar would need an external BEC to be on the safe side. I suggest your try adding one to your system and see if that changes the bad lidar message.
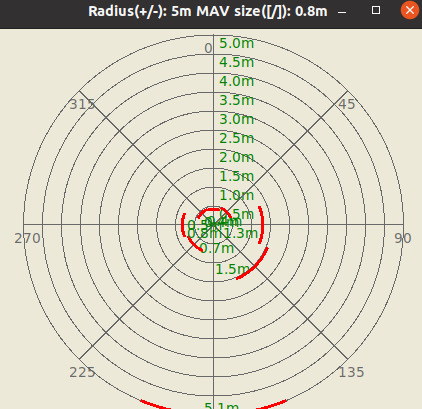
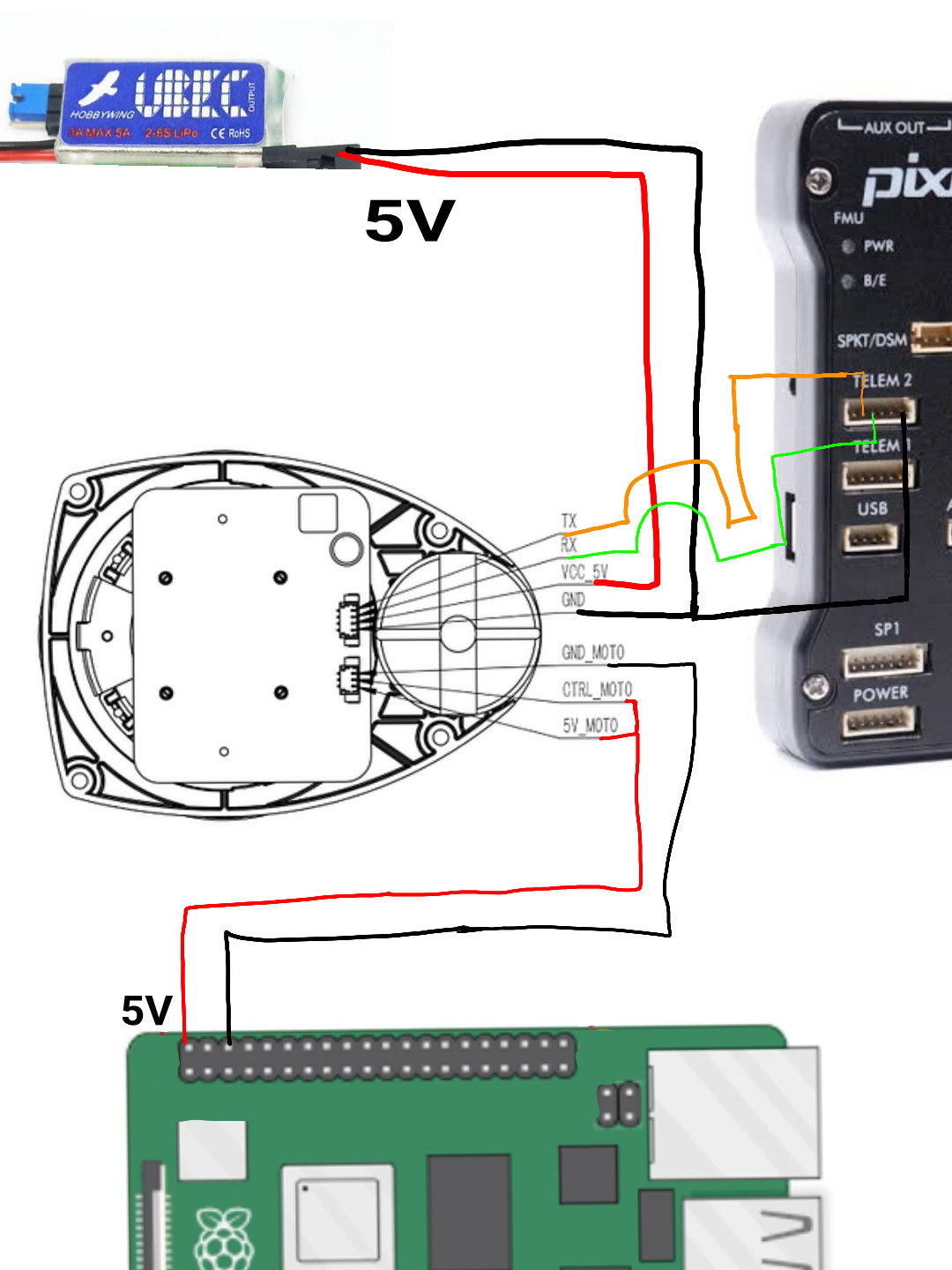
Hello! I also seem like have the similar thing. I connect the RX, and TX of the sensor to the TELEM 2 instead, and also supply the sensor’s VCC with UBEC, because i read that it supplies enough current, the ground of TELEM 2, sensor, and UBEC are connected together, as shown below. It’s still not working (the radar not showing any obstacles nearby, or that red line). Now i have several questions:
What parameters to be changed, if i’m using the TELEM 2?
Is this wiring correct? I use Raspberry Pi’s 5V pin to power the motor
Does the vehicle need to be armed to make the sensor working?