The internal red LED is flashing and the infrared LED was glowing but Ardupilot did not receive any data.
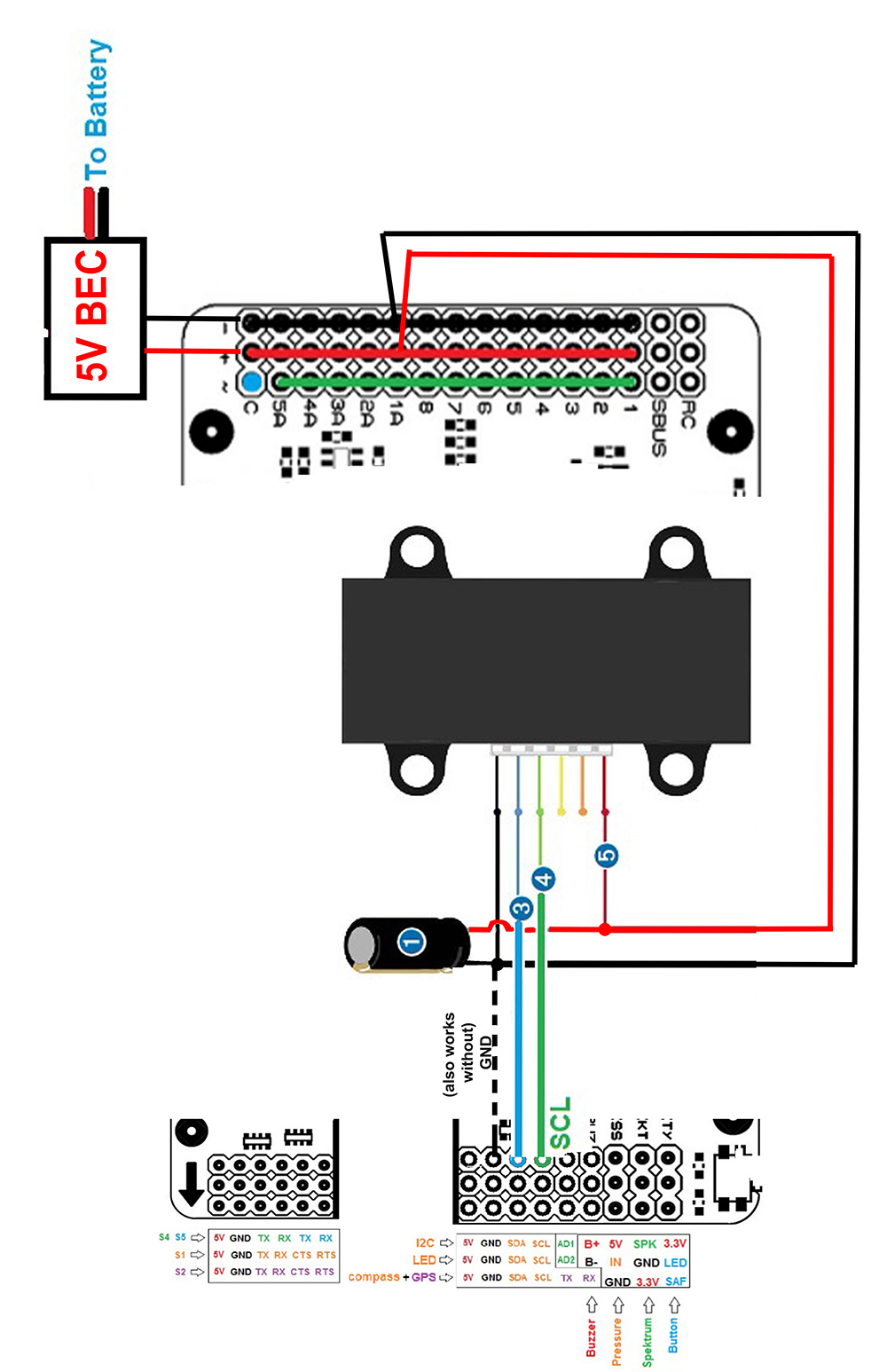
Then I tried via I2C. Also different connections like in Wiki or Garmin manual. With external BEC and without, additional GND to my Dropix and only GND to external BEC. Nothing happens.
Via I2C I do not find a way to make the infrared LED glowing but internal red LED is still flashing.
So first question:
What does make the LED glowing? Only the 1kOhm resitor? (I use two 470Ohm instead) How does it work then via I2C?
Good day, take care coz the red led its not a let but the laser diode inside.
don’t exceed the 5.0V when powering the sensor.
You have to set few parameters in MP for make it work
Better you use i2c protocol for it
Hello, yes it is a near infrared laser (not an LED, correct). I meant the infrared laser = infrared LED. And then there is a red LED inside the case flashing when powered.
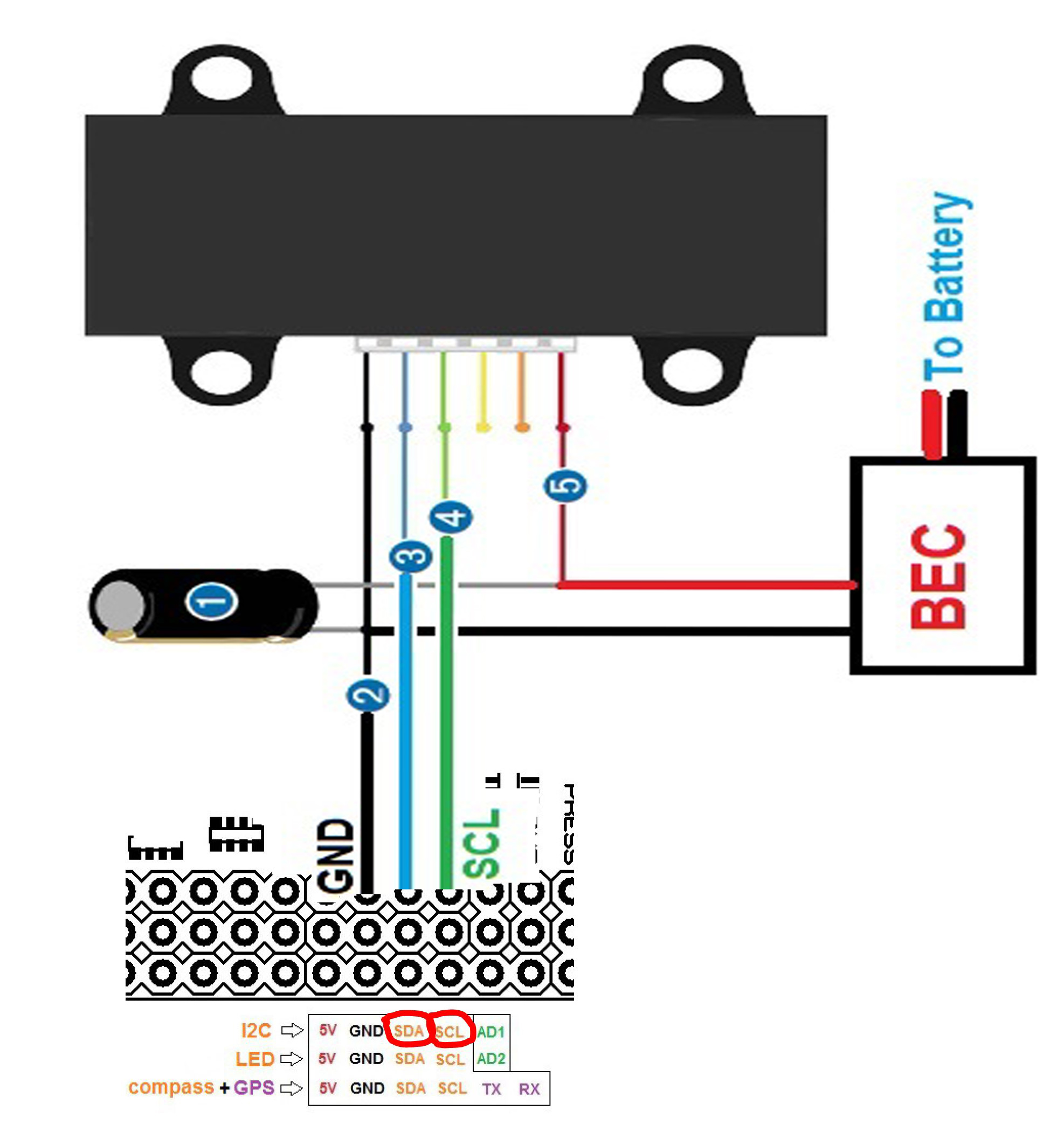
I still do not understand why the near-Infrared laser glows when it is connected via PWM but not when connected via I²C (checked by digital camera) althoug red LED flashes in both cases. Something must activate the laser. I think the 1kOhm resistor? Or what is it? Do I also need to add the resistor when connected via I²C?
Then I have no idea why the laser is not working and why it is not detected. I just changed the BEC by one that creates exactly 4,9V but still no difference. When should the laser start working when connected via I²C? Directly when powered or later? When i have a resistor between PWM and GND it starts directly after power is connected. When connected without resistor and with capacitor the laser stays off.
Hm makes sense
Which address do I have to set? Never used more than one I2C device before. My other i2C device is my compass, attached to the row below.
Could somebody please add this information to wiki?
This is how it works now on my Dropix. Did not see the reason to add a third BEC because the one on PWM output is only for redundancy so I conntected it there.
I suggest power extra periph you need with an ubec if its required like rangefinders…, rf antennas… etc.
Power the rail of the fc… if supported by the hardware, provide redundancy.
Just consider that too much lite can saturate the reading of the sensors…, when it’s time i suggest you led infrared rangefinders…, low power consumption and fresh rate more fast
I considered using IR rangefinders but I think a laser lidar is more suitable in my case. We already talked about this: Which LIDAR sensor for distance measurement?
About powering: I think I still have redundancy when the lidar is connected to the PWM rail of my FC. The BEC can provide 3A but the lidar only needs 0.135A. Or is there something I haven’t considered yet?