Hi everyone,
I’m working on a mower Rover with 2 electric motors set up as skid steer. One left, one right.
It’s in 2 paddle input now but acted the same when it was set up as mixed steering.
The problem I’m having is that there is some kind of cross talk between the left and right motors.
This is easy to notice in manual mode.
When I throttle the left motor forward, the right motor spins backwards for a split second and stops.
Same with the right side.
I originally suspected some kind of motor controller regen or mechanical issue.
But I noticed from the motor controller log data that the actual input to the controller already has this problem.
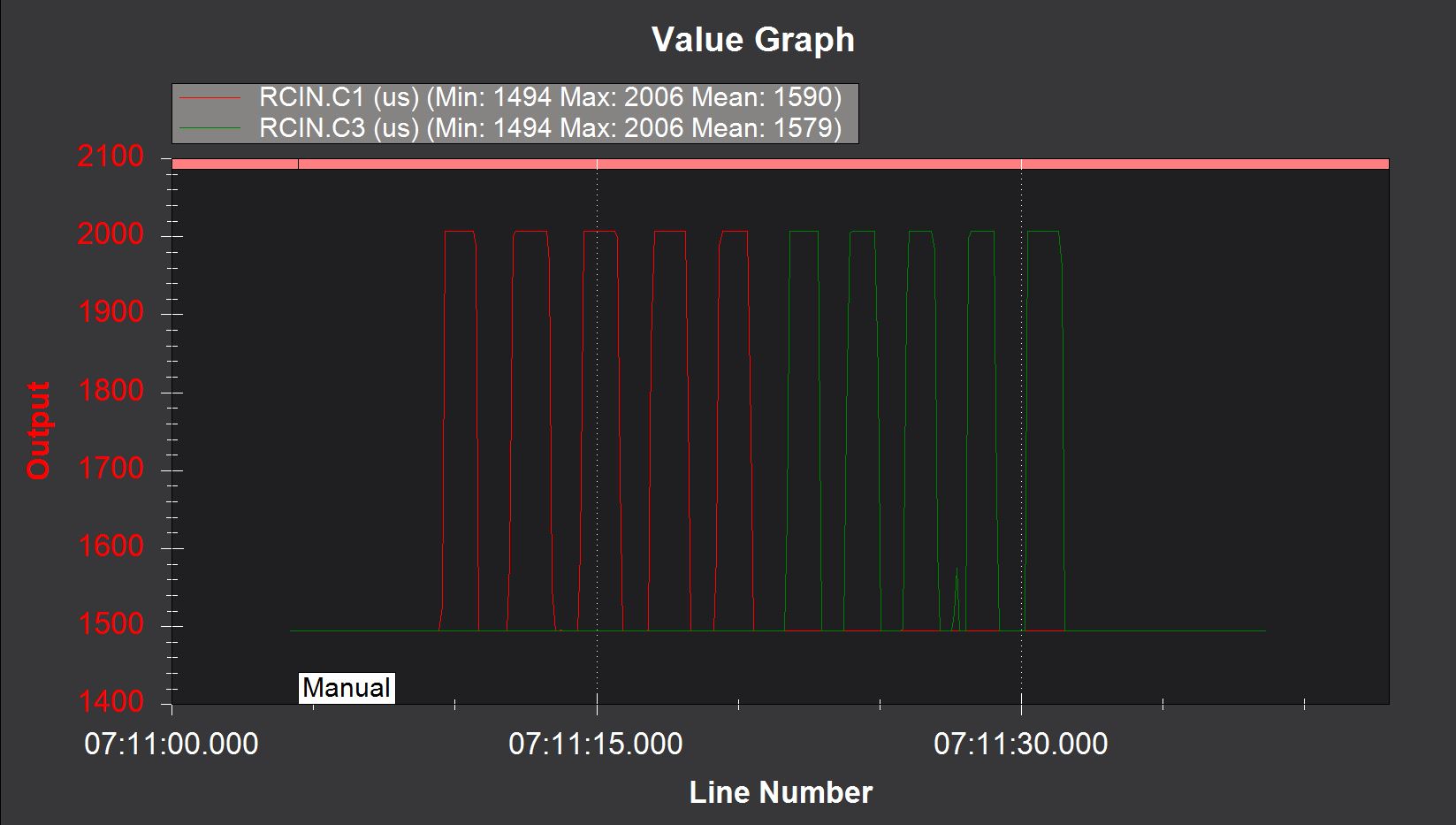
From the Pixhawk log data, the RCIN looks fine.
This is 5 throttle ups of the left and then right motor.
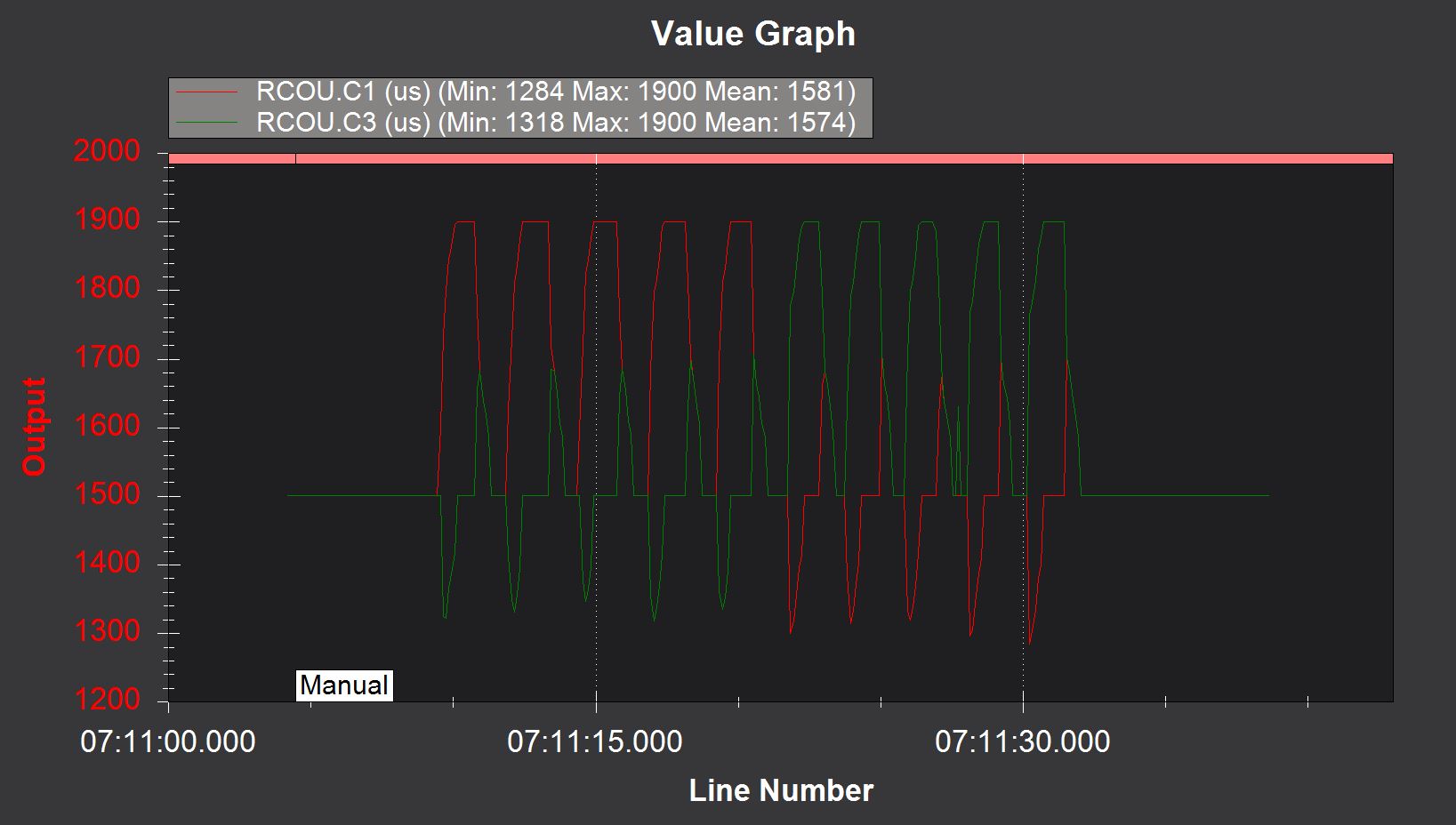
But looking at the RCOUT data there is something going on.
When I throttle up the left side motor, PWM output on the right motor also changes by ~200.
What could be commanding the opposite side motor to have any input?
(C1 = left, C2 = right)
The rover is working well other than this odd issue so hopefully can get it figured out!
I have noticed some strange hunting in Auto mode and I am pretty sure this is the root of that issue also.
Thanks!!
Tony
As I wrote in the other thread, save your parameters, flash arduplane or arducopter and then ardurover again.
I had errors like this multiple times now. My ackermann steering rover suddenly had full steering output to one side, but the RC trim and RC input were at 1500ms. I could only steer from full to center, the other half of stick movement did nothing. Changing rc trim also did not do anything. And the servo was behaving normal when connected to the receiver. One of my skidsteering rovers had the spike/crosstalk issue you are describing. I do not know if it is even possible, but I suspect some kind of bit error in flash rom.
I just flashed the Pixhawk with Arduplane, then Ardurover again, and re-wrote my previous settings from file. Unfortunately it is still having the same behavior!
Sorry to hear that. It has been a while since I last had that issue, so I can not remember, if I used the saved parameters or if I did the whole setup by hand again.
Perhaps you could try and only do the essential parts of the setup from scratch. Radio calibration, servo outputs and arming check to 0. Just to check if the error persists.