I have just finished my Pixhawk setup.
I have connected LEA-6H GPS with compass that I previously used without any problem on a different FC.
One thing I noticed after doing the calibration is when I yaw my copter in any direction then in Mission Planner I see a opposite rotation.
I would assume that I need to set proper orientation of external compass (the one that comes with LEA-6H).
This is the point where I get lost as when trying different settings (Rotation_none or Rotation_Roll_180) still it’s not working as expected.
Here is the GPS with compass I have:



And here is how the GPS + compass is mounted on my platform:

(note that GPS led lights are on the right side, so it means that the compass is in the top(front) right corner at the bottom)
Could anyone help me out with proper orientation settings of external compass?
Also one thing I noticed is that the offsets are high:
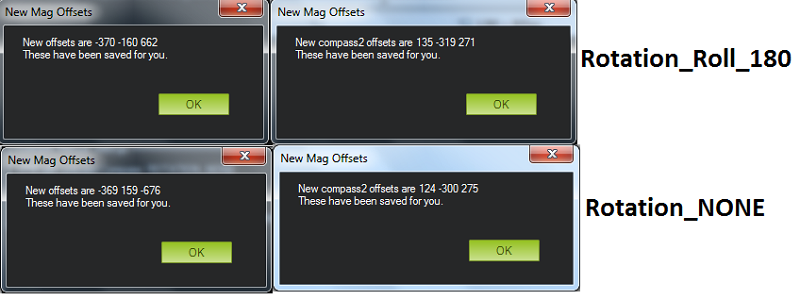
For the first compass (1st row in above screenshot) this is due to the fact that close near pixhawk I have power cables. Unfortunately due to limited space in my platform I can’t move them anywhere else.
External compass offsets seem though to be in acceptable range.