Just got around to setting this up and ran into an issue with setup. I have setup gps board along with esprtk and it gets a lock. I am having issues with connecting it to ardupilot/Pixhawk. I followed the tutorial from ardusimple on connecting it to ardupilot but it does not seem to work. I get “no gps” message. @rhauff, would you mind sharing how you set it up in ardupilot?
No, I didn’t use any script, but I’m also not totally happy with the tuning. If I ever get time to work on this again that’s one of the things that needs improvements. Reading about QuickTune now, that really looks like something I should do.
First order of business though, is to replace my 8" motors with 10" motors from Segway Ninebot S. The mower needs a little more power and traction, and I was able to mount pneumatic knobby tires on the Ninbot motors so they will be a big improvement.
If you are new to ArduPilot and have an F7 or H7 based autopilot, I highly recommend the QuikTune script as a starting point for tuning. It isn’t perfect, but it will outdo most new users’ manual attempts.
I’ve tried using the QuickTune Lua script but my circle mode is not working properly. I set it to 3 meters and it just goes out but never starts turning just sits there. Any suggestions there? Thanks!
I’ve also tried manually tuning it and that’s not going well either It tracks well on straight lines but at turns it goes full throttle, then overshoots and gets back on track. I’ll post a video tomorrow, it acts strange.
Our snow is finally gone here in Minnesota, I plan to get the Lawnbot out in the next couple days and try Circle mode and Quiktune before I tear it all down.
yes, problem is in auto mode. I completed all the initial setup including accelerometer and compass, but I’m using GPS yaw. Tried again lua script today but I keep getting “RTUN: increase steering (x < 10%)” message and I tried increasing speed as suggested in original script thread but still can’t get above 10%.
yes, it just takes a while to get to the outer circle. It slows down to what seems like a complete stop. Let me know how it goes. I’ll try changing to a smaller circle like Yuri suggested.
Ran Quiktune this morning. Used CIRC_RADIUS = 3 meters, CIRC_SPEED = 70 (first tried it at 50 but just looked to slow).
I Did see the “Increase Steering” pop up for a second when it started, but then it went away and completed the tuning.
Here is 3 loops of the 3M circle before tune:
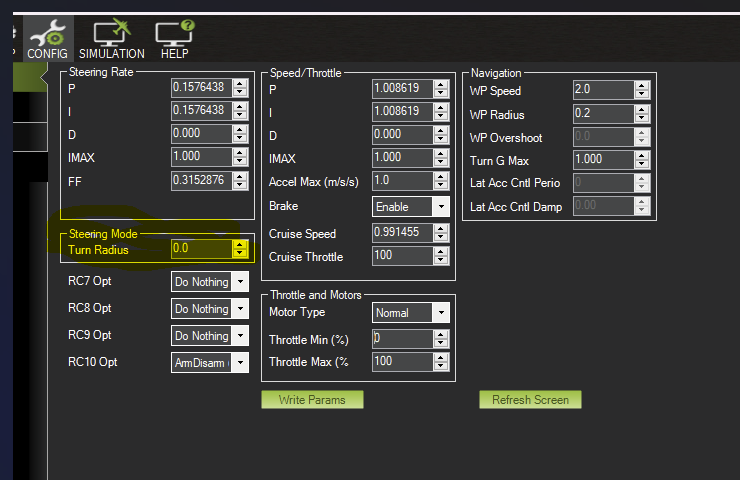
yes, same here. First tried at 4 meters and that did not work, reduced it down to 3 meters and it worked fine. I am still not sure what to put for steering mode - turn radius… Since it’s skid steering would it be set at 0?
I have setup pivot turns. It seems something is fundamentally wrong with my setup, it’s very hard to drive it in acro mode. I have to do more investigating. Manual mode works fine though. Below photo shows the parameter that I was talking about earlier. Numbers there are from the quick tune script by the way.