Hi,
I am a rookie to use adrupilot in a Lawn Mower which is Skid Steering and have tried to solve the turnig problem for a week. I still have no idea how to fix it.
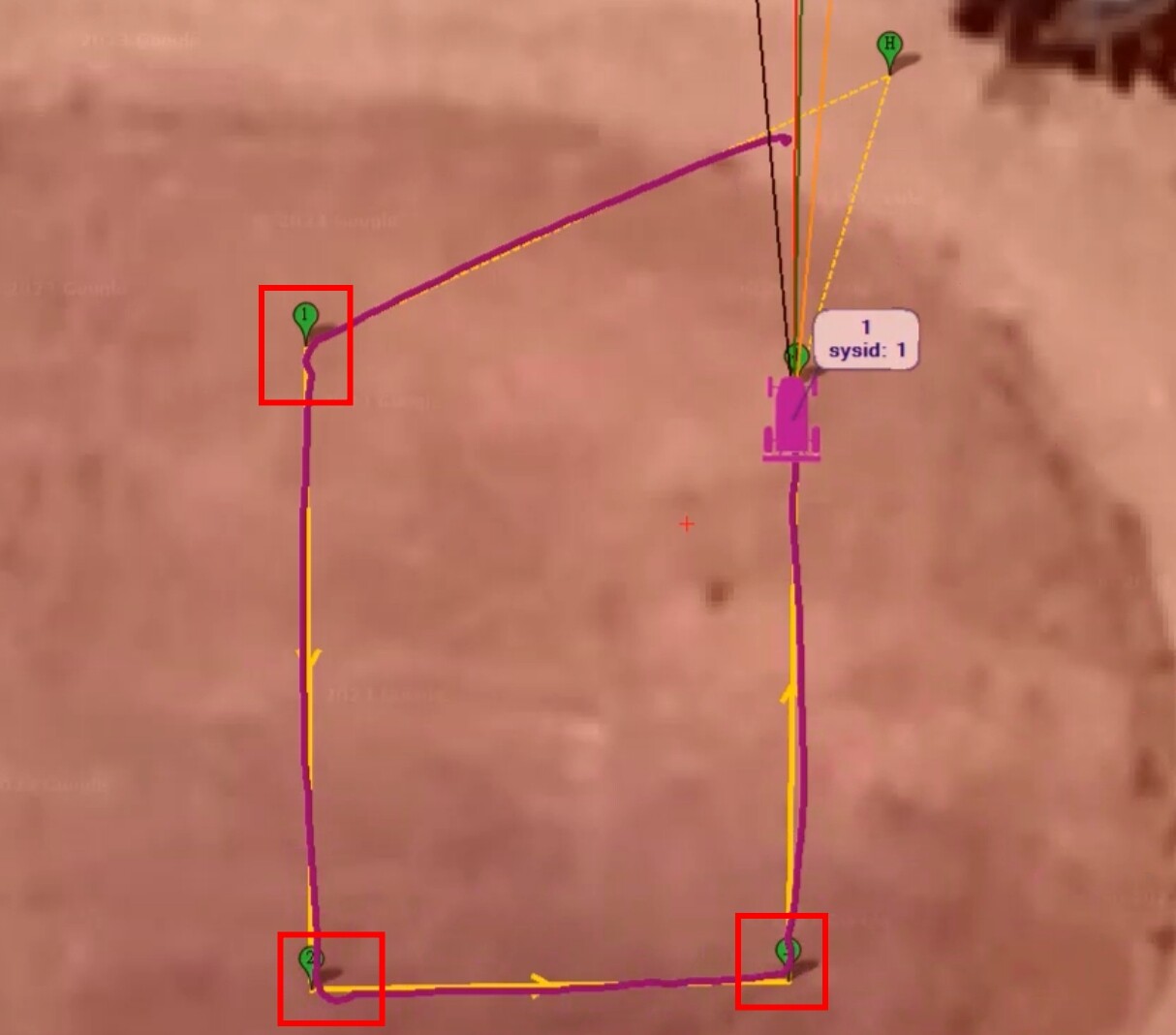
My Lawn mower can go almost straight toward the next waypoint , but after turning ,it wil go a little bit over then turn and go back to the main route .(as the red square)
I have tried to adjust the many parameters, but still can’t fix the problem.
mission planner route
Here is the basic tuning:

Here is the log file :https://drive.google.com/file/d/14LqHfQeg1_L8cd6f0eAshZJ-1OosbUWq/view?usp=drive_link
I have tried different parameter
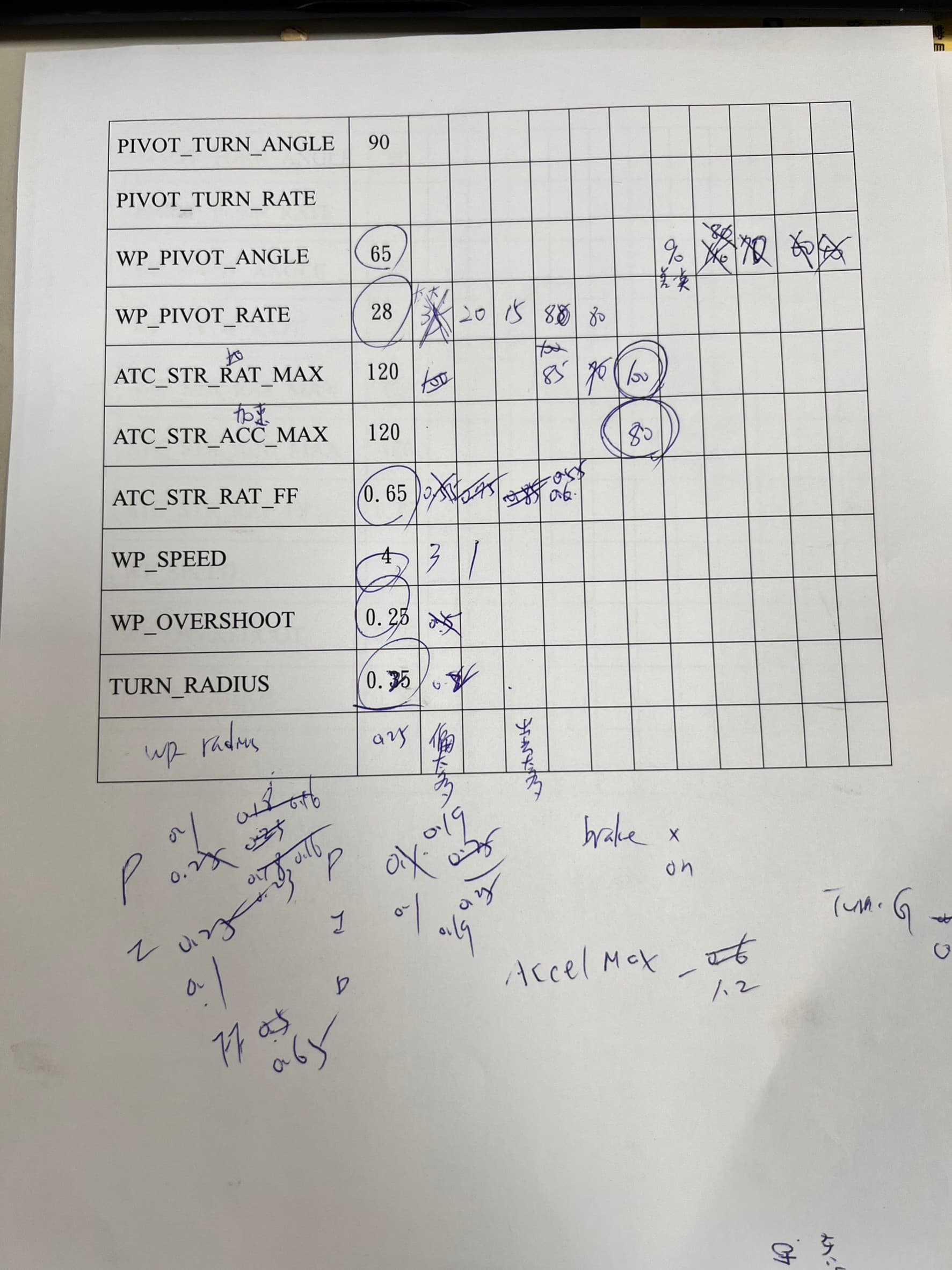
Here is the parameter that I am using now:
WP_PIVOT_ANGLE:60
WP_PIVOT_RATE:28
ATC_STR_ANG_P:2
ATC_STR_RAT_MAX:100
ATC_STR_ACC_MAX:80
ATC_STR_RAT_FF:0.65
WP_SPEED:4
WP_OVERSHOOT:0.25
TURN_RADIUS:0.25
I really can’t find out the problem ![]()
![]() and hope to know which parameter that I should adjust.
and hope to know which parameter that I should adjust.
Thank your for your help!!