I have a 680 Hex with a pixhawk which has been doing auto flights as setup.
I took it out on a fairly cold day on a planned mission. it flew the coarse very well but i noticed it was
flying about 4mts low. to save a crash landing i switched into RTL. and it did a perfect landing.
I’ve encloesd the planned mission details, and the log from that flight.
Can anybody find a reason for this. Seems like the model set off with a minus ALT
There definitely seems to be some strange behaviour happening in your mission.
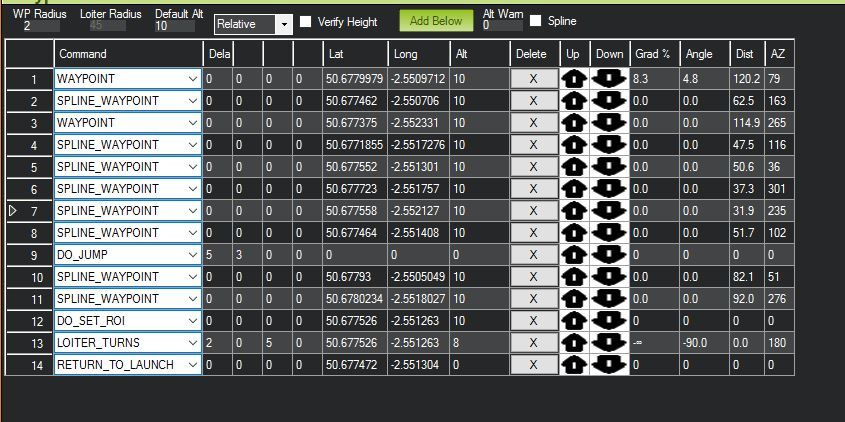
I see you have a DO_JUMP command that should have repeated 5,6,7 & 8 the 3 times but instead repeated 4,5 & 6 the 3 times then carried on, but at command 9 started to lose altitude, which you have in your mission as command 13.
It appears as if the whole mission sequence has been screwed up.
When you load a mission do you read it back to check it is correct?
Just asking.
I switched to RTL before it carried out command 13. Looking at the ALT it started to drop height,
down to about 6mtrs, after the first waypoint. The flight happened as planned, I think.
Again can anybody please tell me why, In a auto mission the Hex goes to correct height for Waypoint 1,(10mtrs), then drops down to around 6mtrs going to waypoint 2. The mission was suppost to fly at 10mts until waypoint 13.
Not sure, but could it be terrain following related? The waypoint it was heading to when it dropped 4 mts could have been at a lower AMSL than the home location?
OAPpilot,
Thanks for the report. It does look like we have an issue somewhere but it’s going to take some investigation to figure out where it’s going wrong. It looks like a conversion issue between the EKF origin’s altitude and the Home altitude in the spline control. The idea that it could be terrain following related is also possible. Sadly we don’t record in the dataflash logs where the command’s altitude is a terrain, alt-above-home or absolute-alt. I hope to add that to AC3.5 because it will make support easier.
I’d like to clarify that what appears in the CTUN.Alt and CTUN.DAlt fields is the actual and desired altitude above the EKF origin. The EKF origin altitude is normally close to the home altitude but they can be different by a few meters.
Some of the logging appears to be turned off in this log. In particular the CMD and NTUN messages are missing which are useful and not very big.
Hi Randy
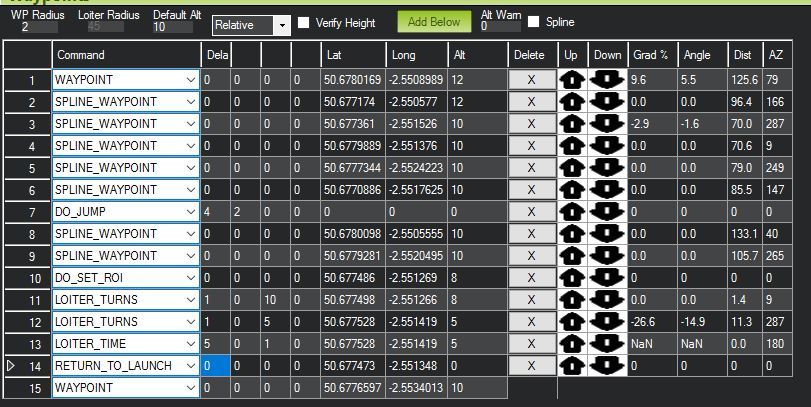
I had another fight to-day, which seems to be under full control. I’ve attached the bin file (including NTUN & CMD), also flight plan very much the same as last one. Hope this helps to sort out the problem