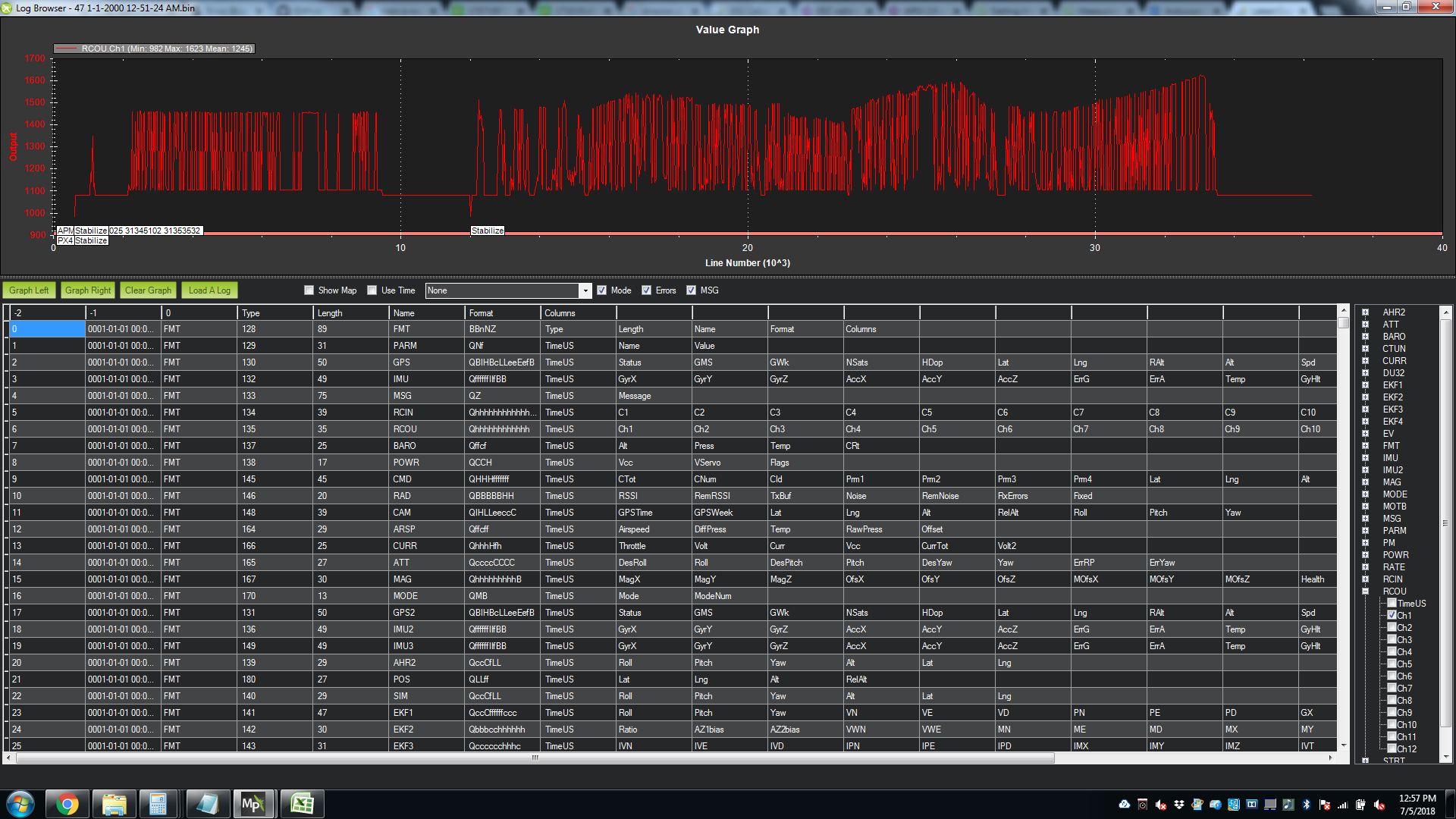
I built a very large x4 frame (which is somewhat flexible, I’ll admit) and tried to do my first flight yesterday. I’m running 3.3.2 and could not get it to lift off the ground. I’m just looking at my logs and see my RCOUT channels fluctuating between expected ‘normal’ values and 1100 pwm… Is this normal? What could be causing this? My VibeX, Y, Z, are within normal limits. I have some clipping on the imu, but not crazy huge amounts… Here is my CH1 output (the others are similar).
One pic does not tell us anything.
Can you please post your .bin flight log.
Here is the .bin
is it possible vibration could cause it?
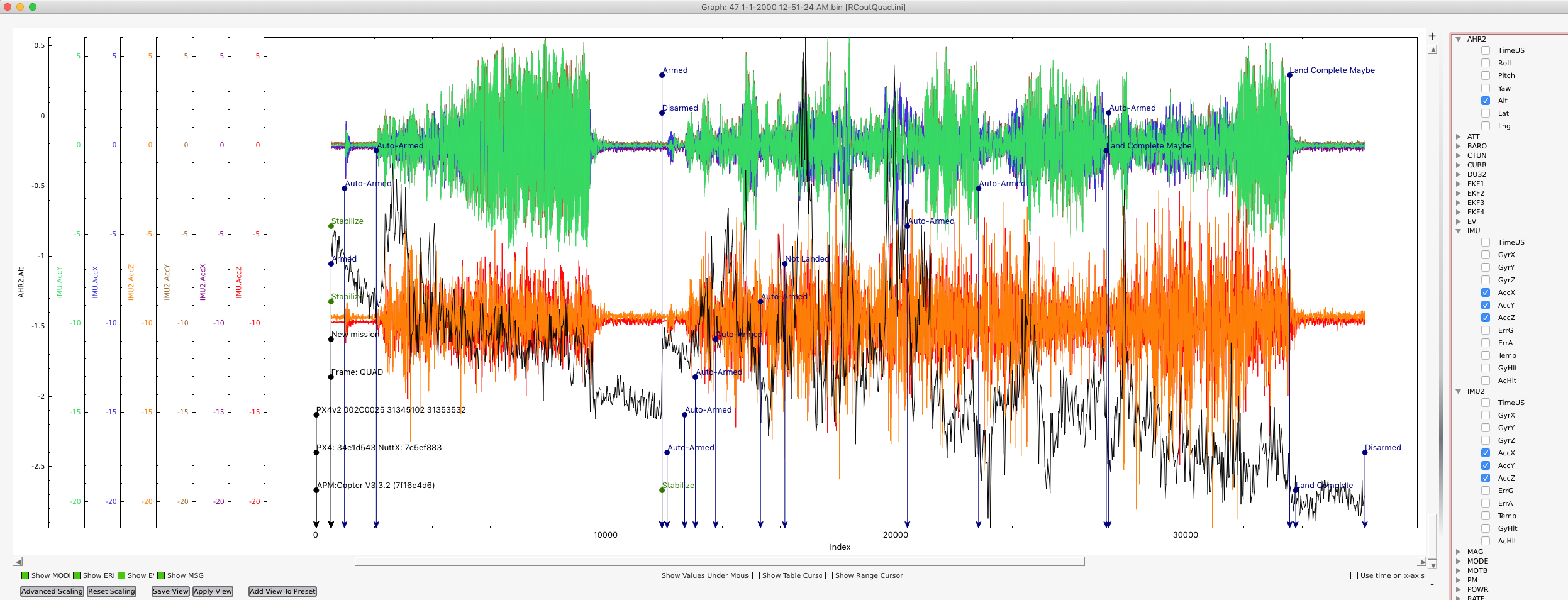
I think the IMU values indicate the problem.
Flex in the frame will cause this.
There is a very good forum post on the Tarot Peeper frame which exhibited pronounced motor pulsing in flight due to motor mount flex. A video is provided and it be worth a look for you to see if it is similar to what you are seeing.
Even the Vibe values show clipping, which you noticed, indicating you have a problem in that area.
1 Like
Thanks Mike. I did a number of things to reduce vibration and was ultimately able to fly. Rubber spacers for the motor mounts, balancing propellers, improvements to flight controller damping board, reducing the PIDs to half of the defaults, and 10 Hz IMU filtering.