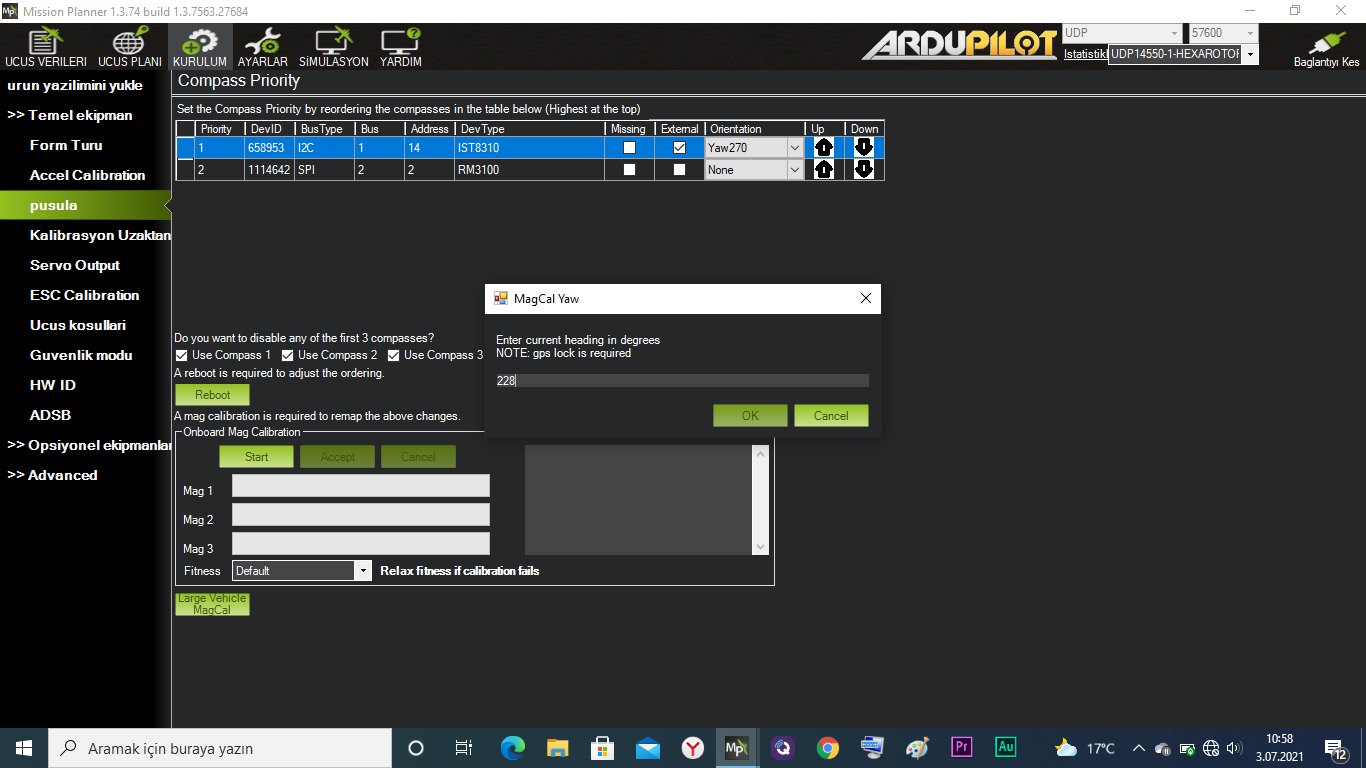
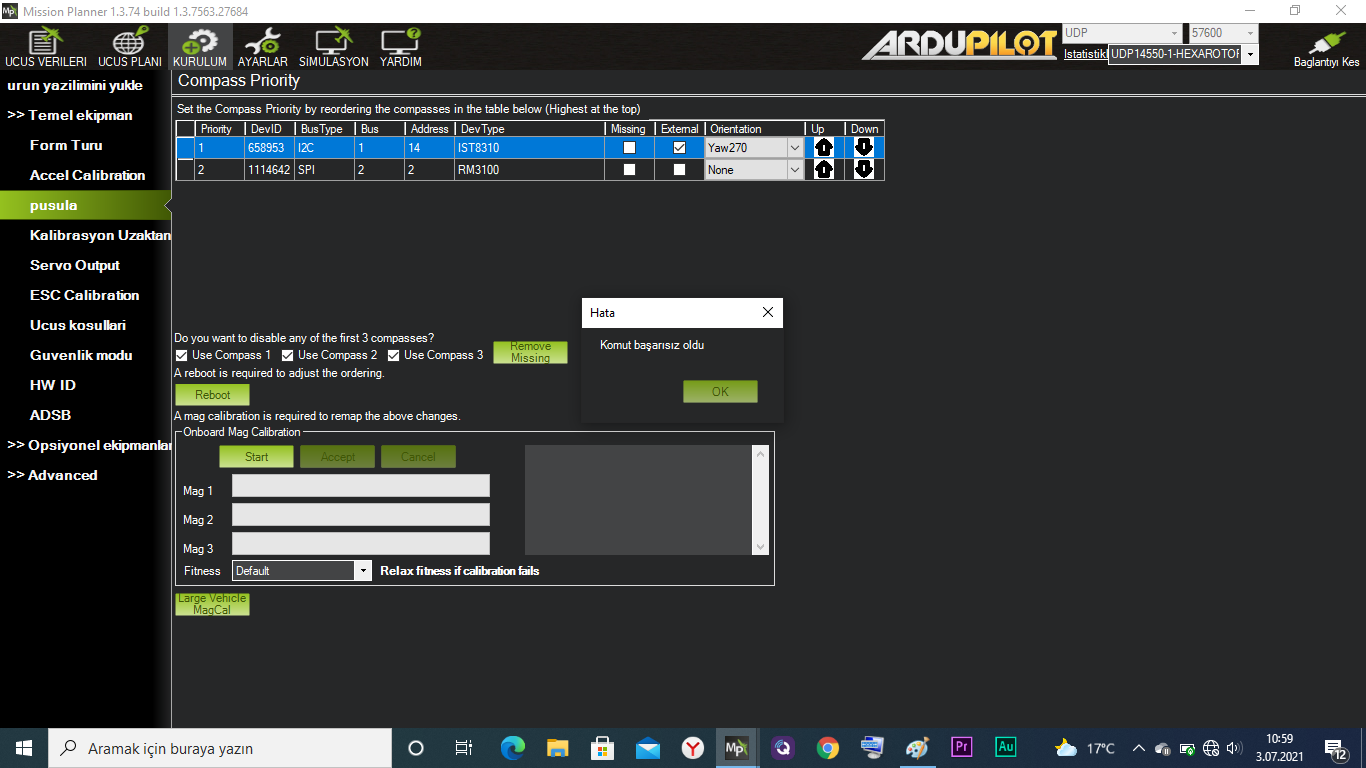
Hello to everyone. Friends, I can’t do Large Vehicle Compass Calibration. When I enter the compass DEG value from the phone, I get the command failed error. And it gives “MAG Healthy” error on the HUD screen. I’ve looked at other related threads in the forum, no one found or shared a solution. I couldn’t find detailed information on the wiki page either. Thanks in advance to all my friends.
I just want to make sure you know you need the magnetometer a good distance from the motors and electronics. It’s common to have the magnetometer and GPS on a pole away from the rest of the 'copter. Are you using a pole? How far is the magnetometer from a motor or electronics?
You might want to calibrate the compass with a longer pole than you plan to use just to make sure you can eliminate the possibility you have a problem from magnetic fields produced by the rest of your 'copter. Once you are able to successfully calibrate the compass you can reduce the pole length to see how long it really needs to be. You will likely need to calibrate the compass every time you change the pole length.
Thank you for your answer. Normal calibration is happening. There is no problem. The problem starts with the large vehicle calibration. It gives a command failed error.
Thank you for your answer. Normal calibration is happening. There is no problem. The problem starts with the large vehicle calibration. It gives a command failed error.
Sorry to hijack but this reminds me of a relevant question. I see some parameters for if the GPS is not at the center of the vehicle, but its measurement seems to be in meters. If the GPS is only say 1 ft (~30cm) is that worth putting in (ie 0.3) or is that for large vehicles where the GPS is a meter or two from the flight controller?
Hello again everyone. I tried it with the Pixhawk Cube drone. Same error again. Normal compass calibration is very difficult on large drones. Please, I look forward to any help and suggestions.
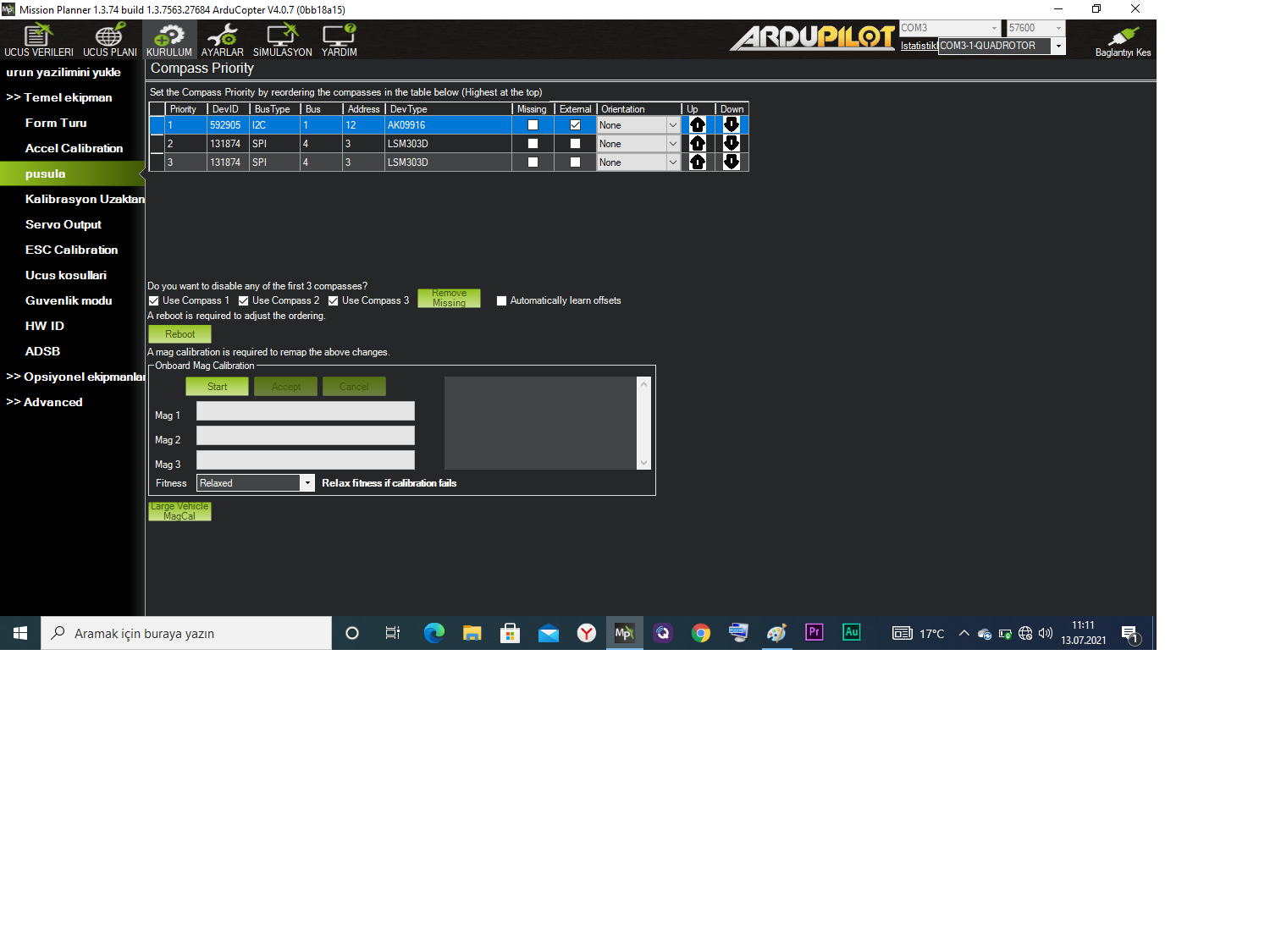
I’m thinking the on board compasses are suffering from interference from nearby electronics and even the flight controller itself. I can only seem to get good compass readings from external compasses. The LSM303D in my pixhawk always gives poor readings. Randy recommended I disable it, which I’ve heard in the past also. I just ordered a Matek M8Q-CAN so I can rely only on external compasses and disable the internal ones (lsm303d). Maybe try that? I see you already have relaxed fitness for the mag test so probably there’s not much else you can do.
I reread this thread and I mistook your issue, my apologies. I think the problem may be that this feature was added in the 4.1 beta, it doesn’t appear to exist in 4.0.7 according to the release notes. If you are brave, try the latest beta arducopter firmware, and it would also be a good idea to run the beta updates in Missionplanner to make sure everything is up to date. I don’t use the regular updates button in Missionplanner (just the beta updates one) but from my understanding the normal update button actually puts on a pretty old version, so you probably want to use beta
Copter 4.1.0-beta1 14-Apr-2021
Changes from 4.0.7
EKF changes:
a) EKF3 is default estimator (EKF2 is available as an option)
b) External AHRS/IMU support (e.g. VectorNav)
c) Gaussian Sum Filter (GSF) allows emergency yaw correction using GPS
d) GPS-for-yaw (dual F9 UBlox, Septentrio, NMEA GPS can provide yaw)
e) Lane switching logic improvements
f) Sensor affinity (improves sensor failure redundancy)
g) Source switching for GPS/Non-GPS transitions (see EK3_SRCx_ parameters)
h) Yaw estimation and reliability improvements
i) Wind speed estimation and barometer interference compensation
Control and Navigation improvements:
a) Acro “air mode” support (see ACRO_OPTIONS)
b) Auto mode arming and takeoff (see AUTO_OPTIONS)
c) Circle options to face direction of travel and/or init at circle center (see CIRCLE_OPTIONS)
d) DO_LAND_START command support for landing sequences
e) Horizontal Velocity controller gets feed forward and logging
f) Position controller update to remove hard-coded Alt Hold velocity derivative and other enhancements
g) Rate PID slew limiting to to detect and suppress oscillations
h) SCurves for waypoint navigation
i) Yaw imbalance check
TradHeli improvements:
a) Conventional and compound helicopter SITL dynamic models improved
b) Intermeshing rotor and coaxial rotor support added to Dual heli frame
6DoF frame support
Object avoidance:
a) BendyRuler hesitancy improvements
b) Intel Realsense 435/455 camera support (companion computer required)
c) Obstacle database now 3D
d) Obstacle filtering improvements
e) Obstacles ignored in cylinder around home (see OA_DB_ALT_MIN)
f) Obstacles ignored near ground (see PRX_IGN_GND)
g) Vertical BendyRuler
h) Simple avoidance backs away from obstacles (see AVOID_BACKUP_SPD parameter)
i) Simple avoidance accel limited (see AVOID_ACCEL_MAX parameter)
j) Simple avoidance enabled above min altitude (see AVOID_ALT_MIN)
k) Simultaneous Dijkstra and BendyRuler path planning
Compass enhancements
a) Custom orientations
b) In-flight learning improvements (see COMPASS_LEARN = 3) c) Large vehicle calibration support (e.g. point vehicle north and push button in MP)
I think it’s the interference of the other electronics that makes the compass calibration fail. You could try to use Copter 4.1 beta (the latest one there is) at your own risk, if it calibrates, to know if it is a software/firmware or hardware problem!