I have a large Agro-quad with 30in props. I had a successful autotune with no payload (lightest and most agile configuration), flies nice and stable with no payload. When i put water in the tank it shakes a lot, the more water (weight) i put in the worse the shakes. I’m not sure an autotune with water sloshing around in the tank would be a good idea. Any help in getting rid of the shakes would be great. Thanks
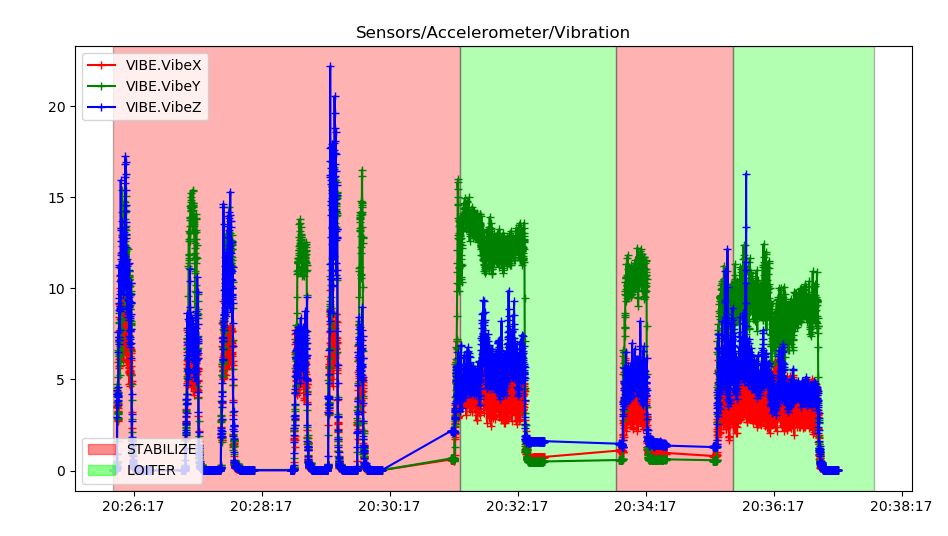
Please share a flight log without water tank. It might be due to how tank is fixed or water vibration inside the tank that causes this vibration. I am not sure. But there exist a high vibration in Y axis this is the only fact for now.
Thanks
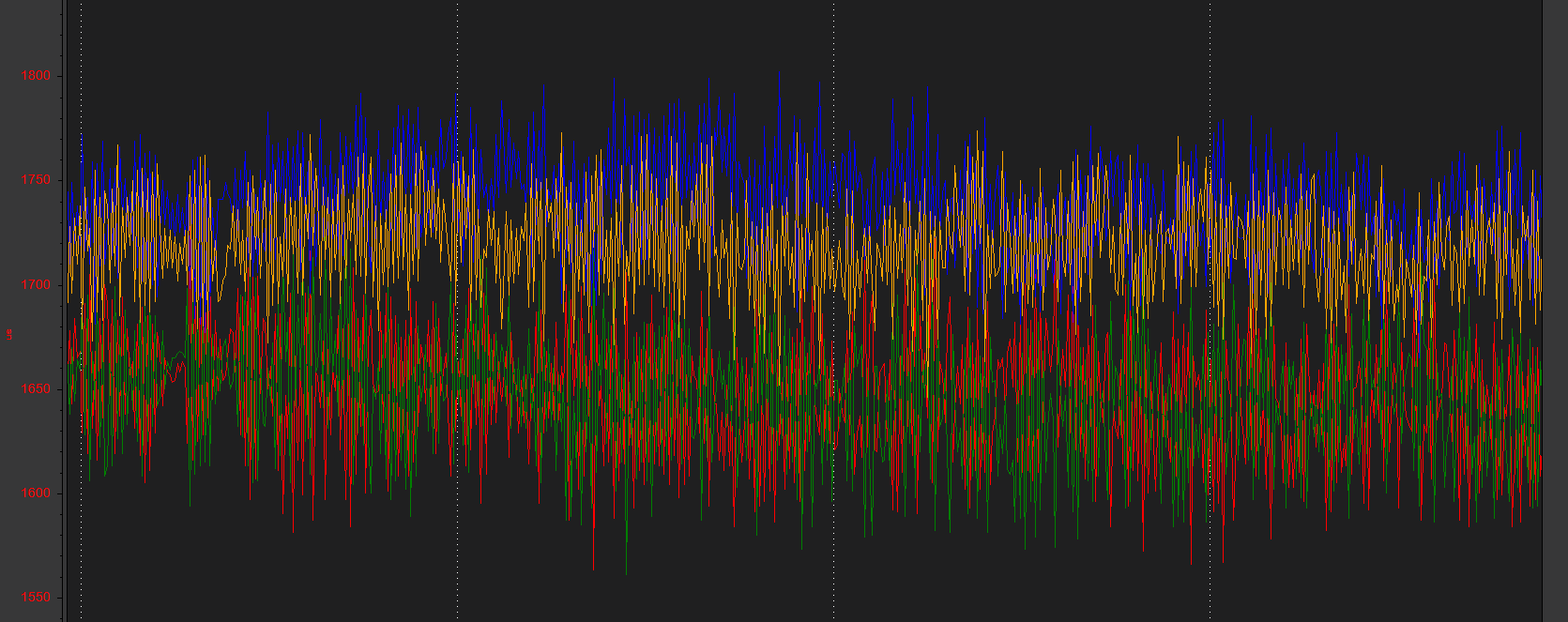
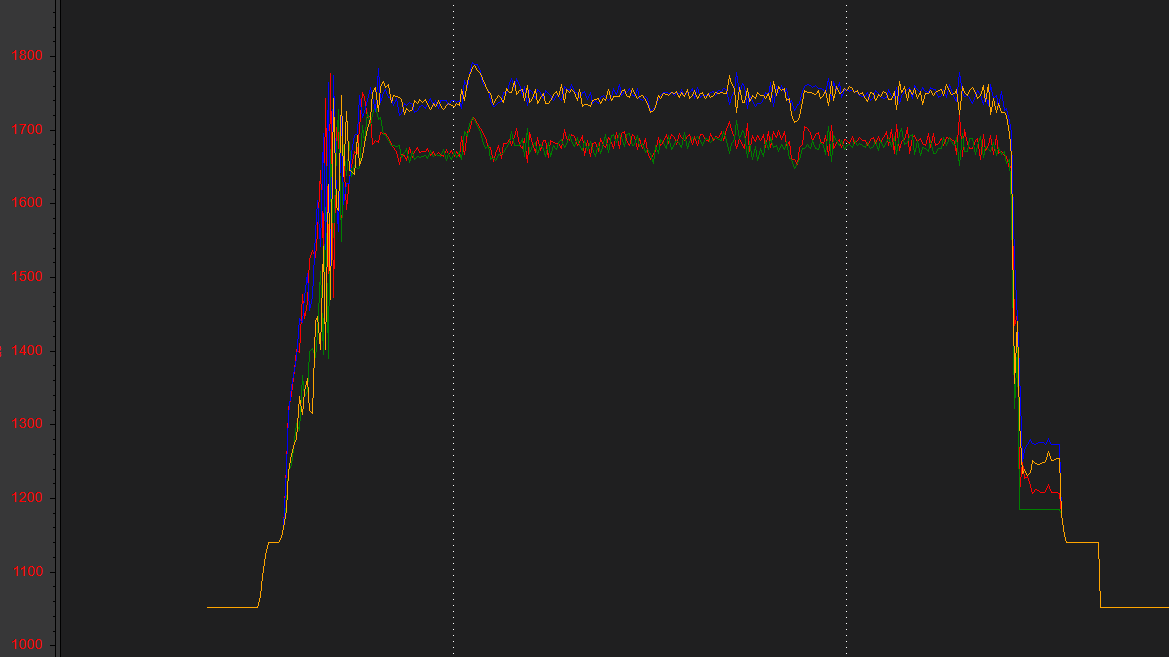
Above graph shows motors “with out water” while the lower shows motors “with water”
The above graph shows that motors M1 & M2 are higher than M3 & M4… that may suggest motors are not perfectly vertical and M1&M2 tries to compensate the yaw generated by M3 & M4.
I am not expert here. but I recommend that you first should fly with no water and the motor graph should give you similar output for the 4 motors. Either motors are not aligned or there is a weak motor.
Leonard,
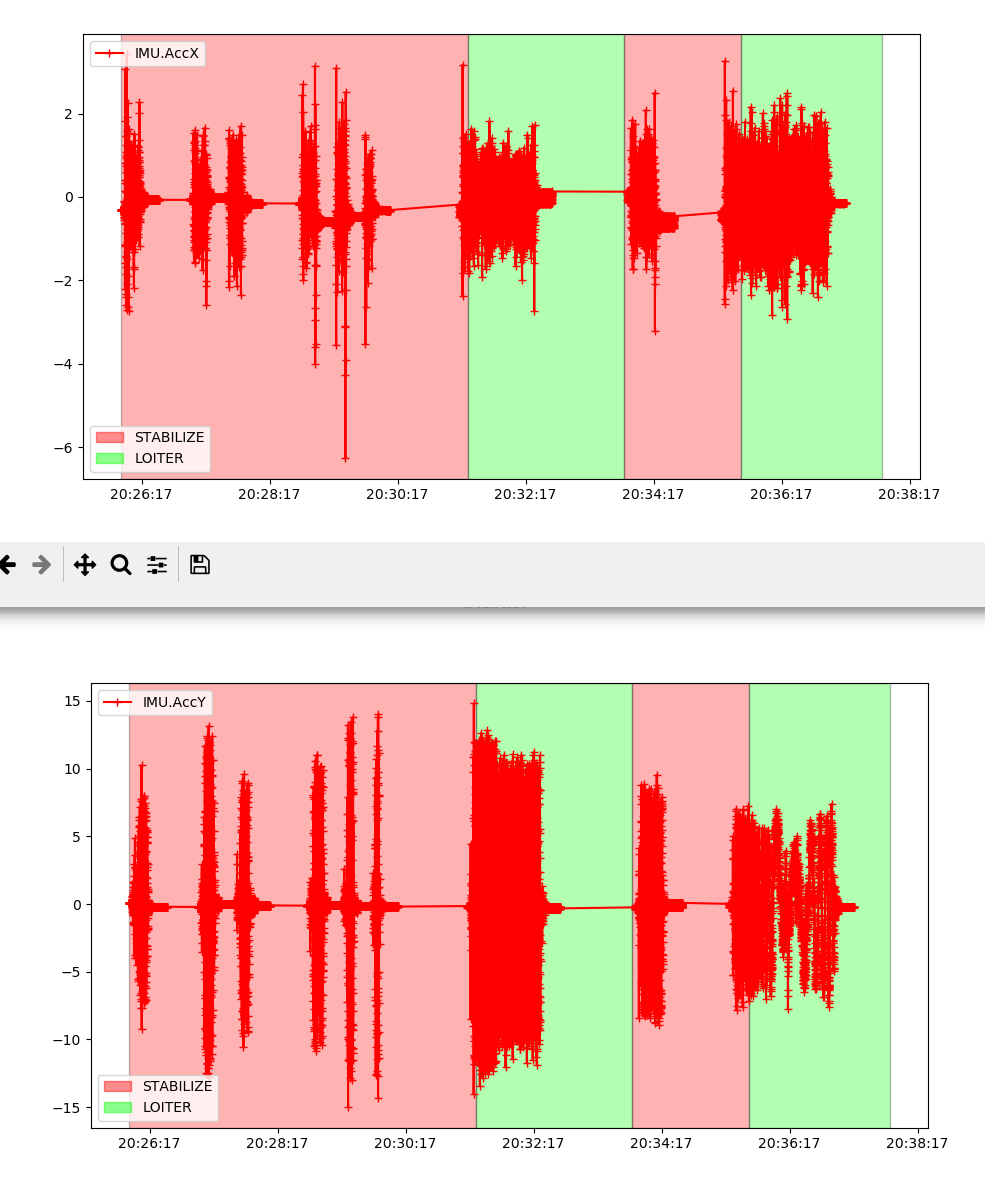
Hi, i followed the tuning page directions and it still shakes, lightly with empty tank, a lot with full tank. The vibes are good, not showing any yellow or red spikes, but the landing gear shakes a lot and the arms shake mildly. Here are the logs from the latest flight “27 July”, first with empty tank, then i filled it up.
I also balanced each prop, verified all the motors were facing straight up and landing gear and tank were not loose.
Use this spreadsheet or press ALT A in MissionPlanner to set a few more parameters
What motors and ESCs have you got? If they are T-Motor Flame ESCs then there’s some special considerations (listed in that spreadsheet) and probably keep a fire extinguisher handy
MOT_THST_EXPO,0.2
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
HNOTCH phase 2
INS_HNTCH_ENABLE,1 <- set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF, hover_thrust
INS_HNTCH_FREQ, peak freq from FFT
INS_HNTCH_BW, peak_freq / 2
INS_HNTCH_ATT,40
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,2
In the log the PWM outputs are quite high, and motors 3 and 4 are working harder. This indicates a physical yaw bias caused by motor 1 or 2 not being perfectly level. And it is underpowered/overweight.
As for the shaking and oscillations, start by lowering your ATC_RAT_PIT_D and ATC_RAT_RLL_D to about 0.0075 or 0.008 and see how that goes. You might be able to increase P and I a little.
Xfacta,
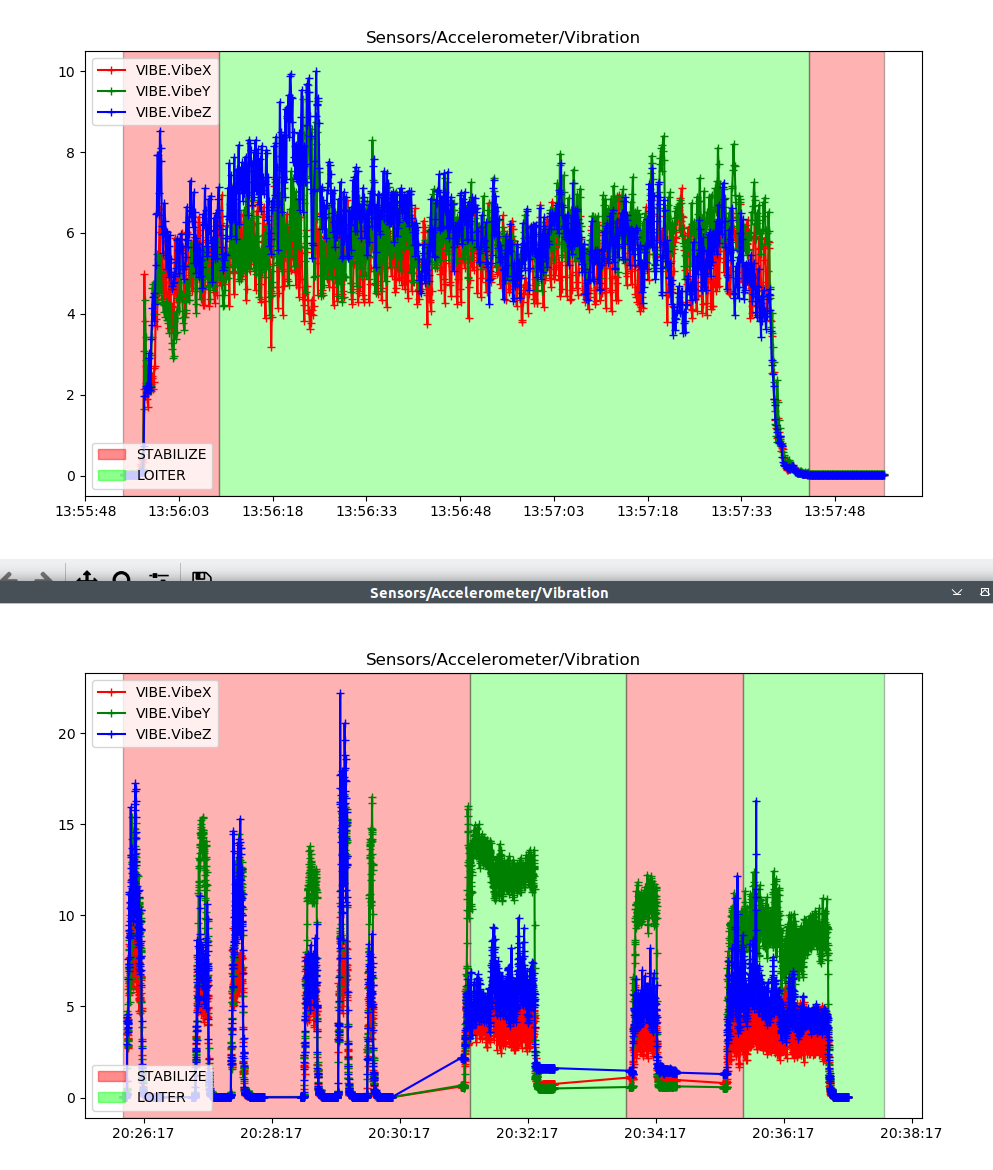
Hi, i did everything you suggested, to included releveling all motors with a level. Vibration is gone! Here is the log from my short flight with a full tank of water can you take a look to see if i missed anything or if you have any further suggestions? The Peak freq was at 11hz.
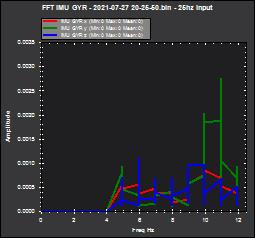
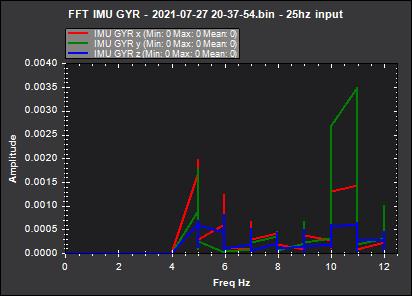
You need to enable batch logging to collect data useful for FFT analysis to set the Dynamic Notch filter. A 25Hz input rate is not useful for this purpose. And you would not want a Notch filter centered at 11Hz.
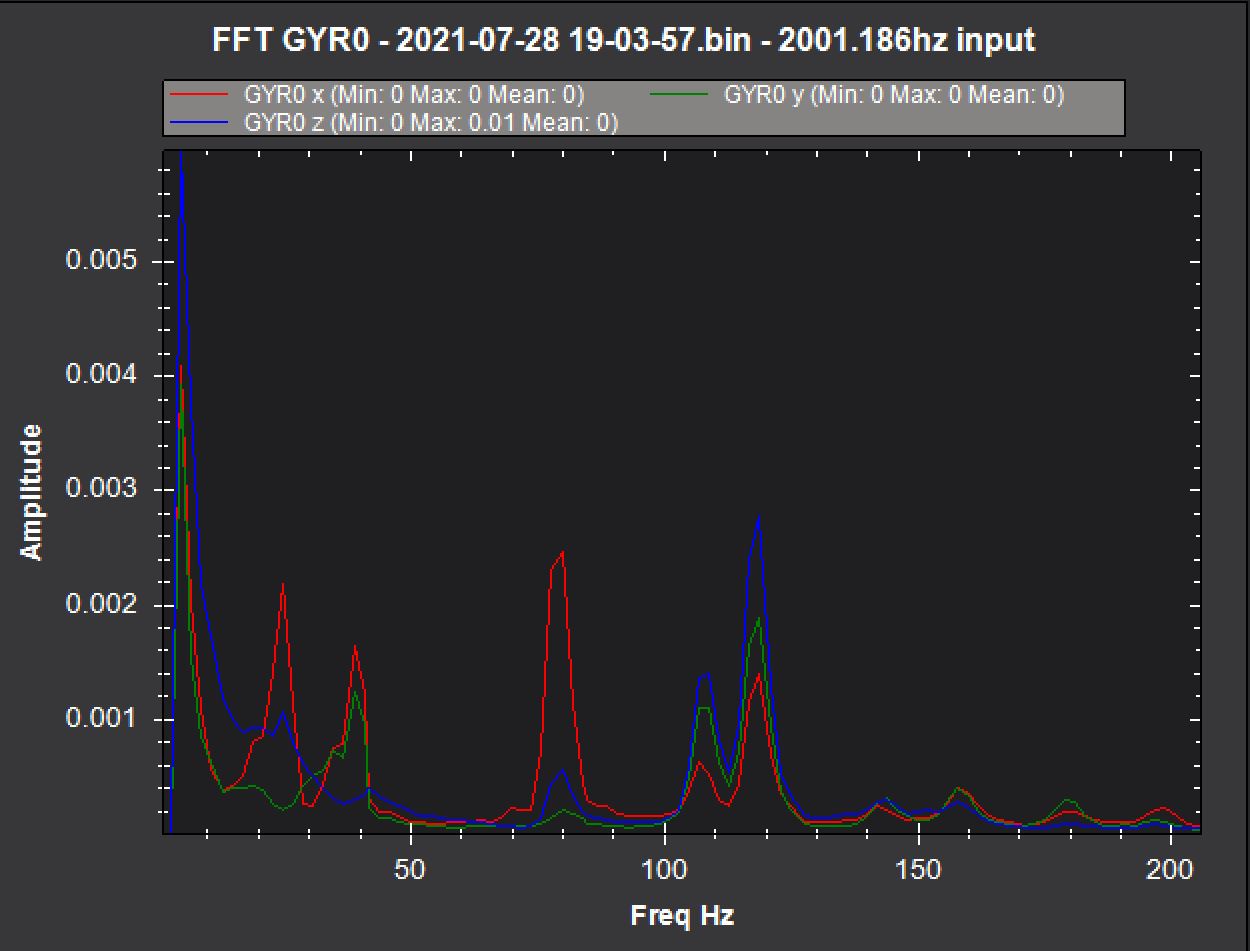
Good question, there are a few modes here. Typically you would see a peak and it’s harmonics and it’s fairly straight forward. You have a peak in 2 axis at 25Hz a peak in all axis at 35Hz, a peak ~76Hz, a peak ~115Hz and one at 160Hz.
There are probably a few opinions on how to configure this but I would try INS_HNTCH_FREQ at 36 and BW at 18 and make another flight after setting OPT to 2. An alternative would be to set FREQ to 76 and BW to 38, hope the upper peaks are covered and perhaps deal with the lower peaks with the Static notch next.
Thanks, should i try another flight with batch logging with a full tank, max weight and see if i have the same readings? Would the harmonics change with weight?
That craft still has a Yaw bias and is underpowered/overweight. You can see it by graphing RCouts and the MOT_THST_HOVER value is indicative also. You could be looking at a potential crash in windy conditions or other high demand circumstances. If you get Thrust Loss errors it will be time to fix this.