You are still on ArduCopter V4.2.0-rc3 , best to update that to latest stable.
There’s slightly excessive Z axis vibrations showing via the non-damped IMU. Probably best to try and tame those Z vibes somewhat. There’s no clipping and it’s not affecting the damped IMUs.
There is some lane switches which appear to be related to differences in altitude between the two baro’s and the GPS Alt. Maybe it is due to prop wash over the baro’s??
There’s lots of
No ap_message for mavlink id (xxxx)
which I cant find the meaning of, maybe the firmware upgrade will fix it.
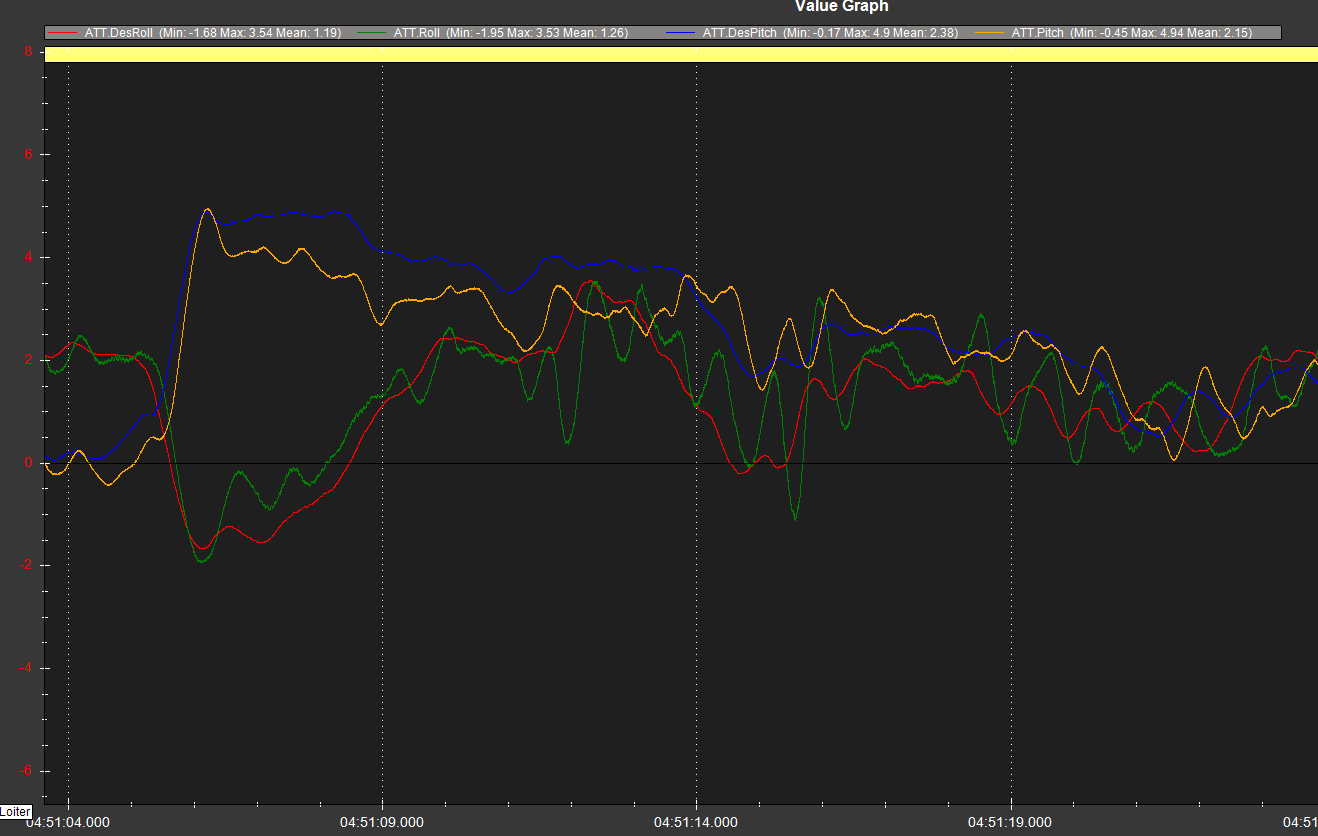
Apart from those, I’d try to improve the tuning somewhat, attitude control
I think your ATC_RAT_PIT_D could be up to 0.007, maybe try 0.005 first
and ATC_RAT_RLL_D could also come up to about 0.005, maybe try 0.003 first
Launch and hover for just a minute or less, land and check motor temperatures. If stability is worse just put them back of course.
Also your MOT_THST_EXPO could possibly go up to about 0.79 and this might help with the stability, but you might have to experiment a little:
- set too high you can see instability at low throttle
- set too low you can see instability at high throttle
Depending on which ESCs you have it might even be better at 0.5
INS_ACCEL_FILTER,10 is quite low, I would tend to keep it at default 20 and try to reduce vibrations. Maybe try to keep it above 15 anyway.
I would adjust your harmonic notch filter as follows:
INS_HNTCH_REF,0.39
INS_HNTCH_FREQ,45
INS_HNTCH_BW,22
After these changes it would be best to Autotune again if possible.
It would be good to see another .bin log if you can make improvements.