Hello,
We are attempting to tune a large octocopter but we are having issues tuning our yaw response properly and are hoping to get some advice on what parameters we should be focusing on now to achieve a stable tune. We have searched through other threads discussing tuning but none of these seem to be for drones of this scale. For reference, our octocopter uses 29.2 inch props, with a MTOW of 25kg and an diagonal span from motor centre to centre of 1.65m.
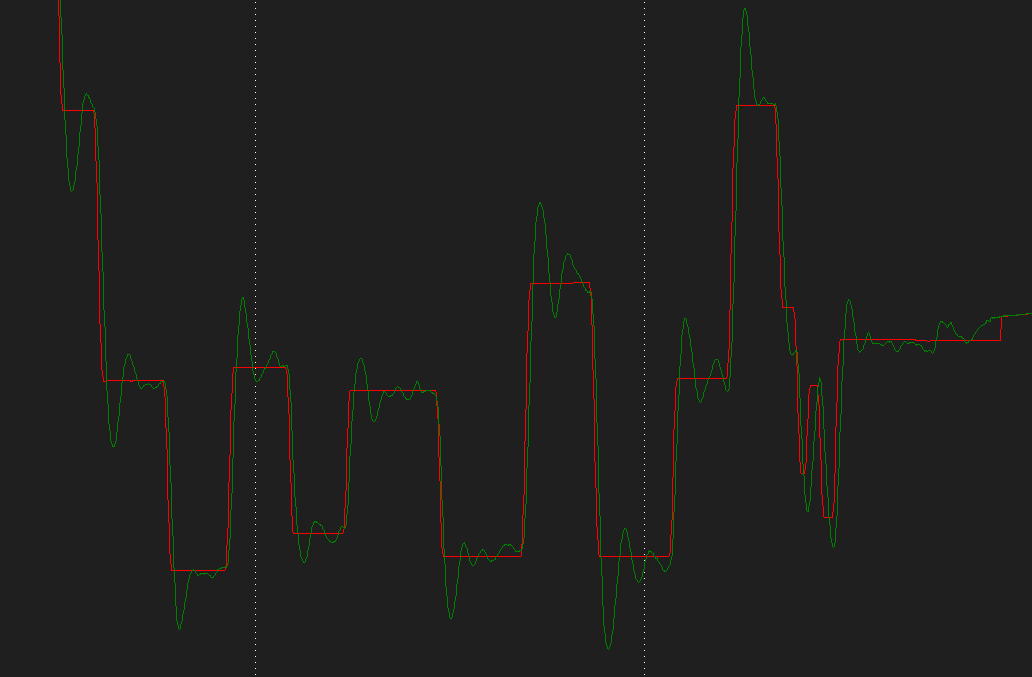
We began by successfully performing a light aggression autotune (0.05) in both pitch and roll and seem to be getting good responses. Yaw response pre-tune however was a bit sloppy with overshoot and oscillations. We performed a light aggression autotune for yaw which completed successfully. A test flight in loiter was subsequently performed but yawing was extremely aggressive and resulted in the craft being unable to maintain stability in pitch and roll. In flight, the copter yaws very rapidly (with even a small input on the flight sticks) overshoots and snaps back very rapidly. It seems to be during this snap back which that the craft is unable to maintain stable flight. Is this likely to be linked to our max accel in y or is it just a case of reducing all PID values and preforming another tune, possibly at a higher aggression?
I have included pre and post yaw tune configs and logs below. Any help is greatly appreciated, thanks in advance!
Do you know ArduPilot Methodic Configurator software?
It guides you in the configuration process.
It might be that you missconfigured something or configured it in the wrong order.
Using the software prevents that
I’m not familiar with this particular tool, how would this be best used to diagnose our issues? l may be wrong but seems that it is a tool best used from the beginning of an initial uav set up. We did follow your " How to methodically configure and tune any ArduCopter" blog post which was very useful.
Another user in the arducopter Discord mentioned our PILOT_Y_RATE_TC value was set to 0 which might be a cause of the aggressive response rate. I think we will try setting this to 0.5 and carrying out another flight to test stability. Thanks for your help!
If you have not used the tool then you did not correctly followed the instructions on the blog post and probably have a suboptimal tune.
Unfortunately Methodic configurator GUI had not been released at the time of our initial setup process (February 2024), we followed your old blog post and had a stable platform although not 100% optimised, and changes to the UAV since that time have necessitated a new tune.
The tool looks great, we’ll definitely use this in the future.
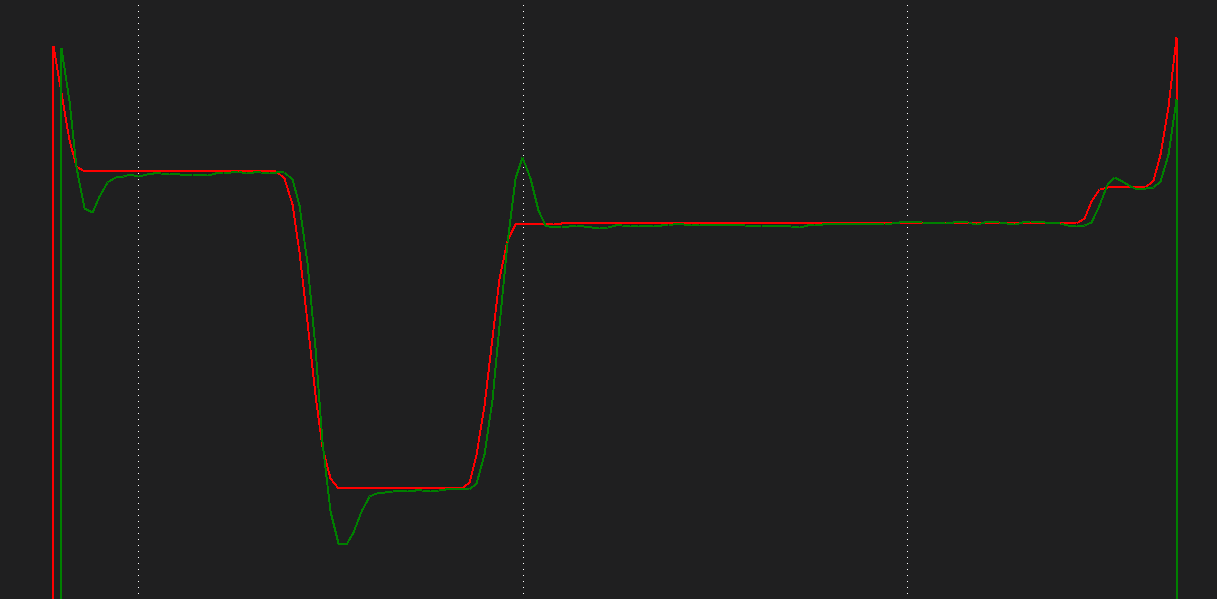
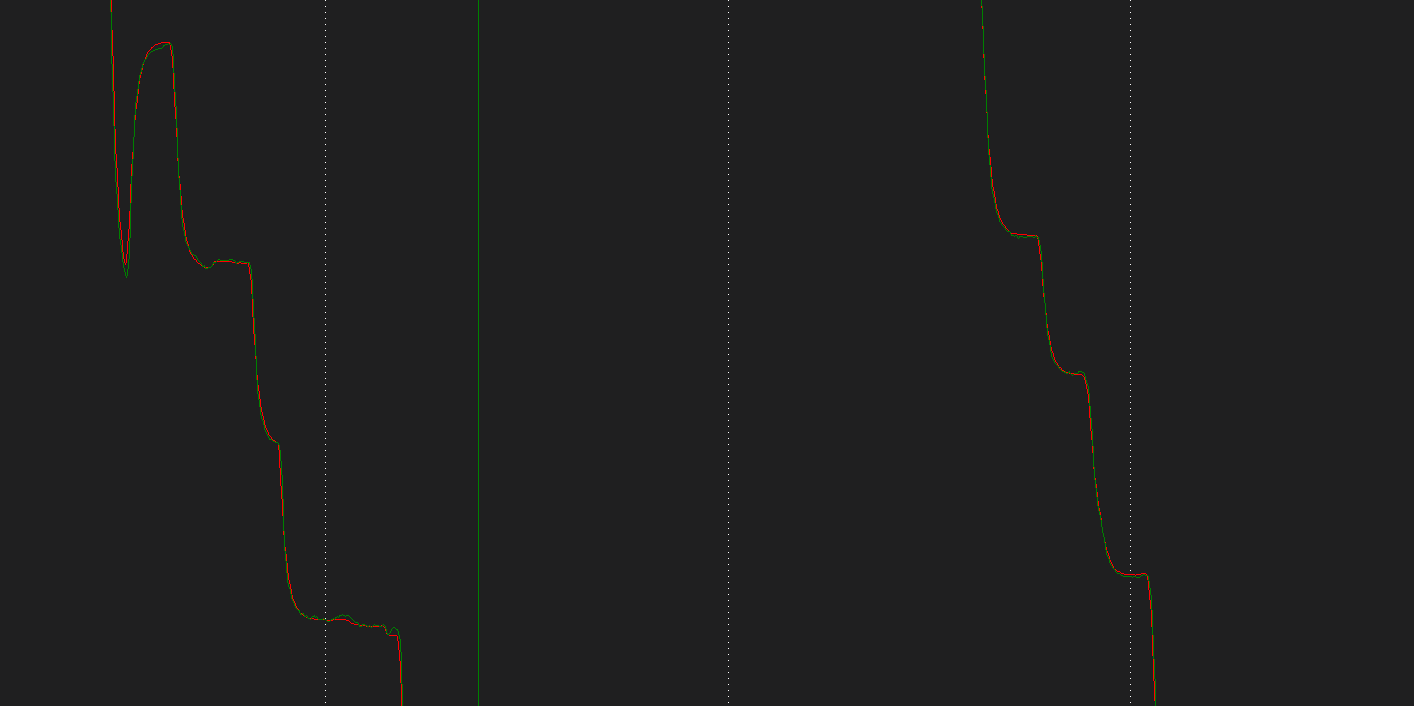
We were able to achieve a much better yaw response after our most recent flight.
Thank you to Fly.XT on the discord for suggesting a change to our PILOT_Y_RATE_TC which was previously set to 0. Changing to 0.5 seemed to help. We also missed changing our ATC_ACCEL_Y_MAX value according to this guidance on input shaping after an autotune. Reducing this by around 30% solved our issues almost entirely. New response shown below: