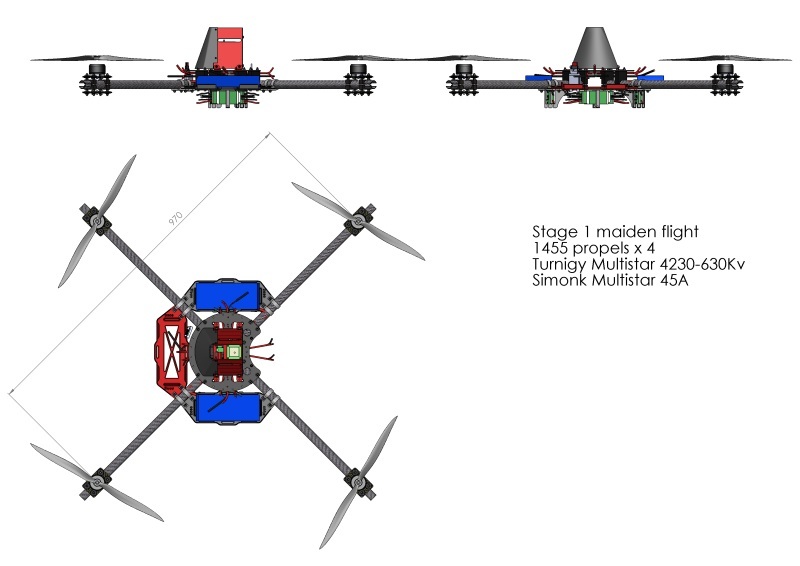
My camera copter is ready for maiden flight except PIDs are still default. Would someone here recommend which PIDs I should try for first flight and perhaps give a tip what else should I do before flight? Maiden flight is as quad and final is X8.
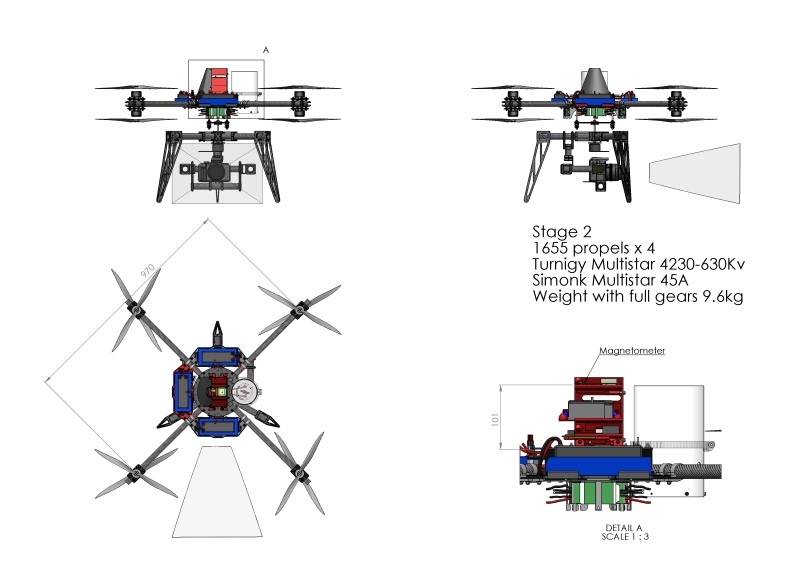
Weight with 1100gr camera/lens, 6m2 parachute and 3 x 8Ah batteries is about 9.6kg. Motors are Multistar 4230-630kv 4s. ESC:s are Multistar 45A flashed to SimonK. Motor to motor distance is about a meter. Propels at maiden flight are 4x1455. Final propels are going to be 8x1655 or even 8x1855 if 1655 looks ok. APM is 2.6 with external magnetometer. GPS is Ublox. APM is powered with APM power module.
So far I have done basic propel balancing, compass calibration, ESC calibration, accelerometer calibration and checked motor directions and tried throttle behavior with reversed propels. Magnetic interference level I planned to try next.
Thanks for your reply! Not too many replies in this new forum yet.
I tried to take off very carefully indoors at garage using default PIDs. Copter was trying to flip to left side and I didn’t try to raise throttle for take off. Tomorrow I have planned to try lower PIDS because flipping effect was quite strong. Copter was on the ground effect but still.
Copter flew today at first time. At first try with P0.10 for RATE ROLL and RATE PITCH copter took off straight up by just adding throttle slowly until it was in the air.
I tried P values from 0.12 to 0.05 and changed I/D relatively equal amount. 0.1 for P, 0.08 for I and 0.002 feels best so far. All those were flyable but 0.05 was very hard.
One problem occured twice; autotrim. Copter became impossible to fly immediately after take off when autotrim was in use. Copter basically crashed on both attempts or at least suffered very uncontrolled landing. Somehow flight behavior changed radically when autotrim was in use.
I tried to reset changes autotrim possibly did by performing ESC calibration and radio calibration. But does ESC calibration or radio calibration reset aurotrim changes?