Hello Everyday!
I tried to combine the pixhawk 2.1 of ardupilot 3.5.5 with 10kg payload large agricultural drone.
The Agricultural Drone (1650 wheelbase) worked well with N3-Ag FC.
The only exchange was FC and related Accessories(such as GPS, Buzzer)
My FC pixhawk 2.1 also worked well with f450 Quad Copter before.
And the radio transmitter and receiver also worked well with the Pixhawk 2.1 FC
The only changed configuration was frame type (Quad X --> Hexa X).
Of course ESC Calibration was done.
The field Compass Calibration(using transmitter with upper throttle and right yaw) of ardupilot was very difficult for large drone. So I can’t complete it. And I forgot to calibrate Accelerator Sensor. But arming test with MP (QGC as well) was OK which means no warning and no Error.
I started with ‘Stabilized’ mode and got failed as following video. The major used control stick was ‘Throttle’.
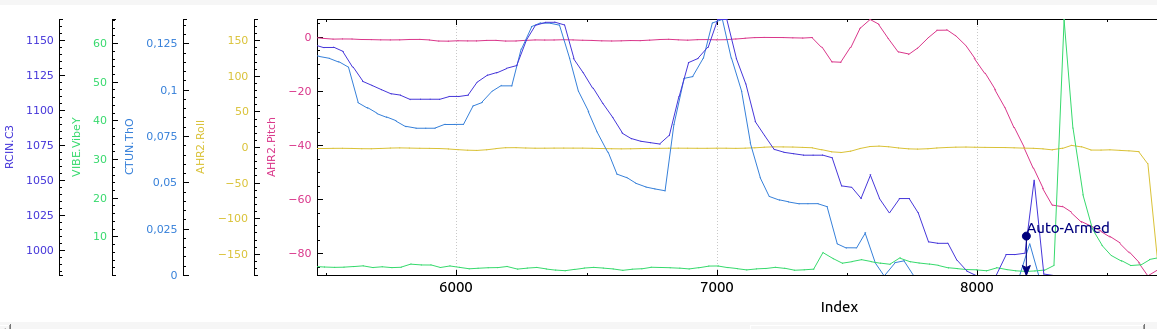
Attached file is the log file. 00000069.BIN (374.5 KB)
It hovers at about 9% throttle.
the crash was because you lowered the throttle stick too much, idling the motors, loosing attitude control. - it’s a thin line on such config as yours (very over-powered.)
Thank you very much for your kind and detailed answer.
Sorry for my late reply.
By your comment, this problem can be fixed with only transmitter setup?
No matter which FC i used, this can be happen?
Your more opinion could be appreciated more.
yes, in stabilize, acro, sport modes, having throttle stick on the bottom means motors go to MOT_SPIN_ARM.
on a correctly calibrated RC controller, this area is usually the lowest 2-3mm of stick travel (depending on the length/geometry of the stick gimbal)
You could program the throttle curve or expo, or expo
additionally: your MOT_THST_HOVER did not had a chance to learn better, it was at 0.48 on start, you may want to put it around 0.13 os so.
It’s not necessarily an RC controller setup error, very likely to be an pilot error if you did not knew that, and were forced to fly at minimal throttle. Given otherwise low vibrations you could fly a bit in ALT_HOLD - that too would let mot_thst_hover have some time to learn.
I know that Programming the throttle curve is done in RC Controller. Is there any other way besides in RC Controller? Is there any parameter regarding the throttle curve or expo?