I have been learning the last couple of months and now started to do some guided flights and things seem to be going well. To me it is flying fairly well, but I noticed doing a auto analysis on today’s 10 min flight I got a fail…large change in mag_field 49% message.
I am flying a spray drone that is a Hexa powered by HobbyWing X8 Pro Motors and ESC’s…the props are 29 inches running on 12s.
Please, if you could take a look at my log and let me know what might be causing this and anything else that needs to be improved or worked on. From what I have been reading my vibration levels seem ok, but I am concerned about clip2 as it keeps going up and I thought I read that might be bad. Anyways, your thoughts are greatly appreciated.
I feel the need to point out using a Dev version on a large craft might be a bit risky.
While you’ve got 4.0.4 Dev loaded, you could do the Booloader update, then load 4.0.3 Stable.
I probably wouldn’t use the MissionPlanner auto analysis unfortunately.
I’d look for messages on your groundstation or in logs post-flight.
MissionPlanner graphing does have some very useful pre-sets, play around with the drop-down list at the bottom of the graphs screen.
It looks like the missions starts again and you get these:
03:44:33 Mission: 1 Takeoff
03:44:34 25 1 : OCCURED OR FAILED TO INITILIASE
03:44:34 Potential Thrust Loss (1)
03:44:35 25 1 : OCCURED OR FAILED TO INITILIASE
03:44:35 Potential Thrust Loss (1)
03:44:36 25 1 : OCCURED OR FAILED TO INITILIASE
03:44:36 Potential Thrust Loss (3)
However I couldn’t find what’s causing those messages. Maybe someone who knows more about that could comment. I’ll try looking though the code myself later…
Z vibrations actually reduce as the flight progresses and the sprayer load goes down - probably to be expected.
Y vibrations go up as the flight progresses and the sprayer load goes down - I’d say check prop balance. Unless something physical happened at the half-way point that affected Y axis vibrations…
Probably look at using the Harmonic Notch Filter, cant hurt.
Other parameters and performance look good to me - nice to see some conservative battery settings for safety and long battery life instead of squeezing out every last milliamp.
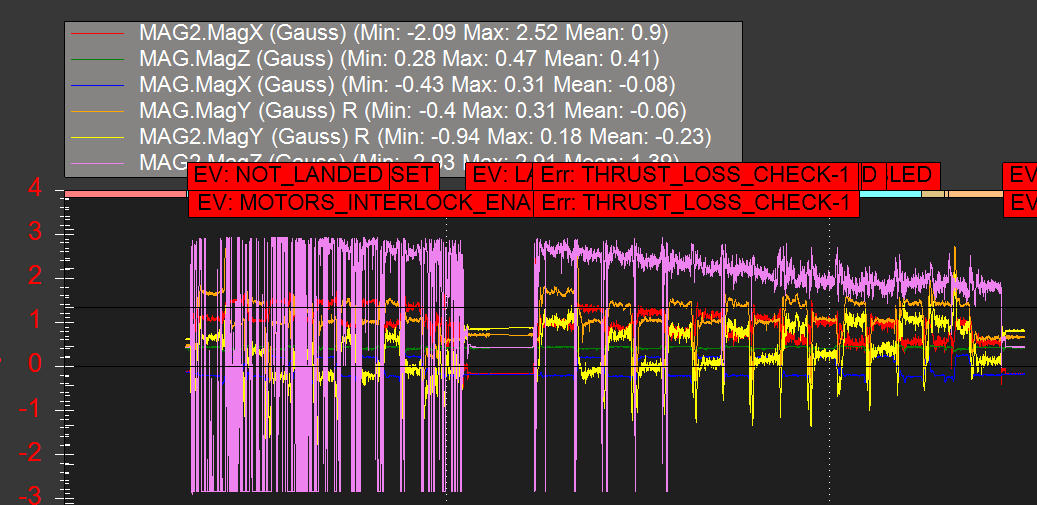
I think this graph from MissionPlanner shows what might cause that auto-analysis mag_field warning:
Wow, thank you so much for your reply…I have learned a bunch from it.
So to answer a few of your questions and ask a couple more questions. Just to fill you in on a few more details. I am using the Herelink controller and QGC and have been running until recently stable 4.0.3. I am working with our programmer who works on other things as well, but he is working more on the Herelink side developing our own custom app on it. He had me download the 4.0.4 dev as that is what he was working with on the simulator side (we live in different states). I agree we need to be careful as it might not be as solid or tested.
The only time I am getting the potential thrust loss message is always when I command it takeoff to a certain altitude in guided mode and then it will go spray the rows of the polygon. I never get that message ever again. One of the problems I am having is I cannot seem to control how fast it goes zero throttle to full throttle and takes off. Once I slide the slider to start mission it takes literally 2 seconds to engage the motors, full throttle and 12-15 feet in the air and then settles down nicely to climb to my desired altitude. The time I slide the slider to mission start to 12-15 feet is when I always will get the potential thrust lost message. Sometimes it will even say it right before it takes off. Wish somehow I could control the ramp up speed of the motors and not go all the way to 100%. After 12- 15 feet it will settled down and climb comfortably at a reasonable throttle level. I will post a video of it.
Overall, I am really happy the way it flies. It sometimes struggles on turns at the end of polygon rows…cutting corners or missing them. I realize this is a known issue and slowing down helps or a delay, but I hate the delay. I have found a comfortable (off the top of my head wp_accel) at 300.
Thoughts? Again, Shawn thank you so much for your time and expertise.
I typed this from my phone finally able to get out and have a beer!!
Also, I understand at full load as I was today my power current goes way up and looks like that causes some issues. Yes, I am trying to protect battery life…using a Mauch sensor. I will look into disabling the onboard compass. I am stressed out of all this…lol. It is just the two of us and has been a lot of work and learning. Still wish I could understand logs better. Again, thank you!
More than extreme caution and from default the response can only get slower. It wasn’t a large craft but I played around with these parameters a bit and not far off of 0 (default) was causing instability with rapid attitude demand.
Is there anyway to control the ramp of the motors and how fast things happen in a guided takeoff? Please see my previous replies on how fast things happen and getting potential thrust loss messages.
I deleted the Spool Time parameter from my post because default for that is 0.5S not 0 as I suggested. The Slew parameters are at zero so no help there. You could reduce the Spool time from the 2s you have set. make it .5s Did you set the MOT_SPIN_MIN parameter based on the motor test? Nevermind I see you have MOT_SPIN_ARM to .1 so it makes sense. Is there a reason you have MOT_PWM_MIN set to 1100? Could be because of the ESC’s you are using I suppose.
Usually an external compass gets labelled as Compass 1, so 2 and 3 are internal. In that Compass calibration screen you can just untick the ones you dont want to use.
It’s safe to disable the internal compass(es) and quite common.