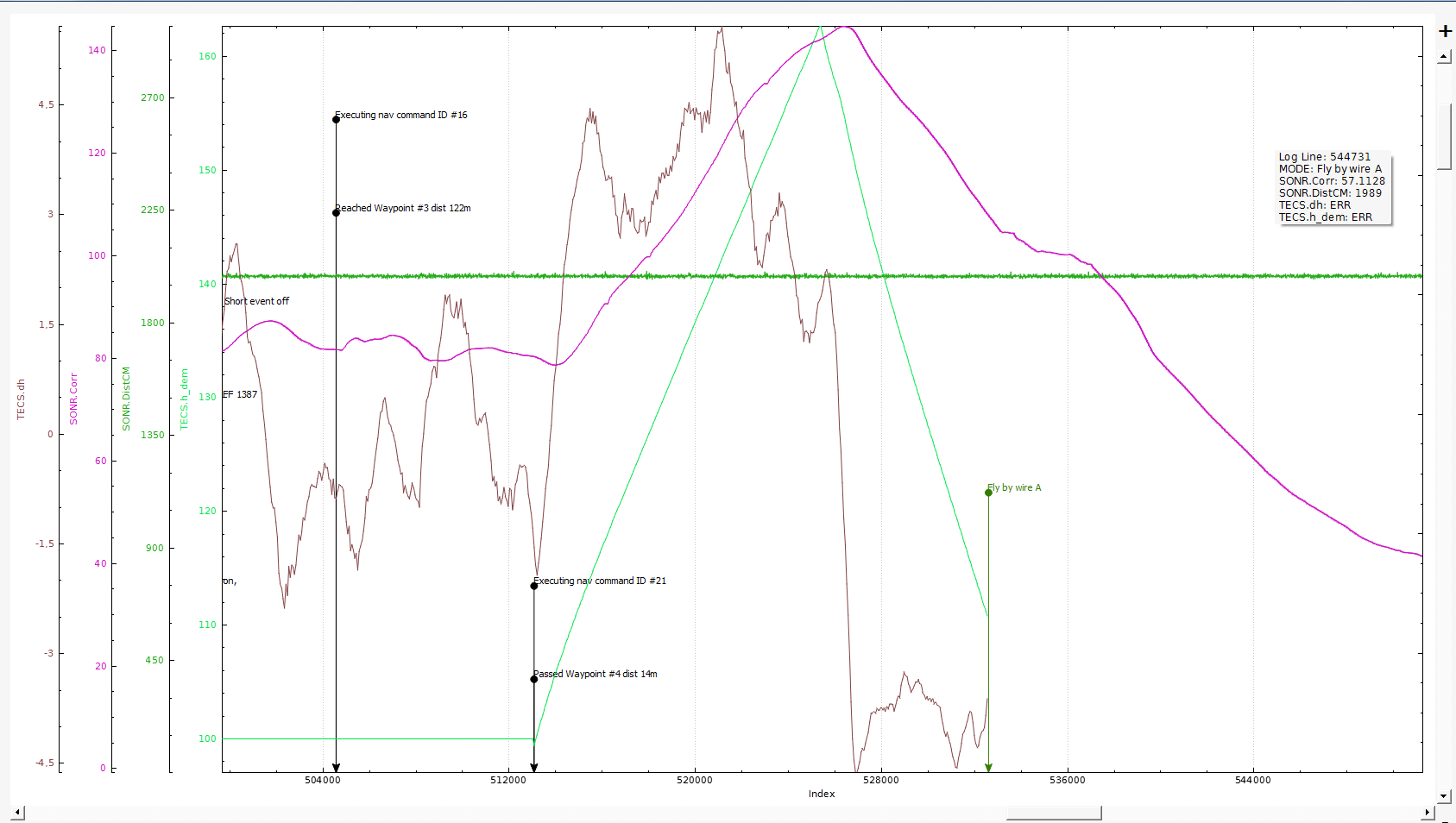
Gas plane with airspeed sensor and LRF. Both working without issues. After reaching last WP before LAND plane goes up with maximum pitch and throttle. Then after about 50 m climb begin to descend like on glide slope but far forward from target touch point. Sensors, AHRS and navigation seemes ok, but ATT commanded pitch and throttle up.

Log file here