Hi!
Heavy quad, 12S power, PH2.1, AC3.5.3.
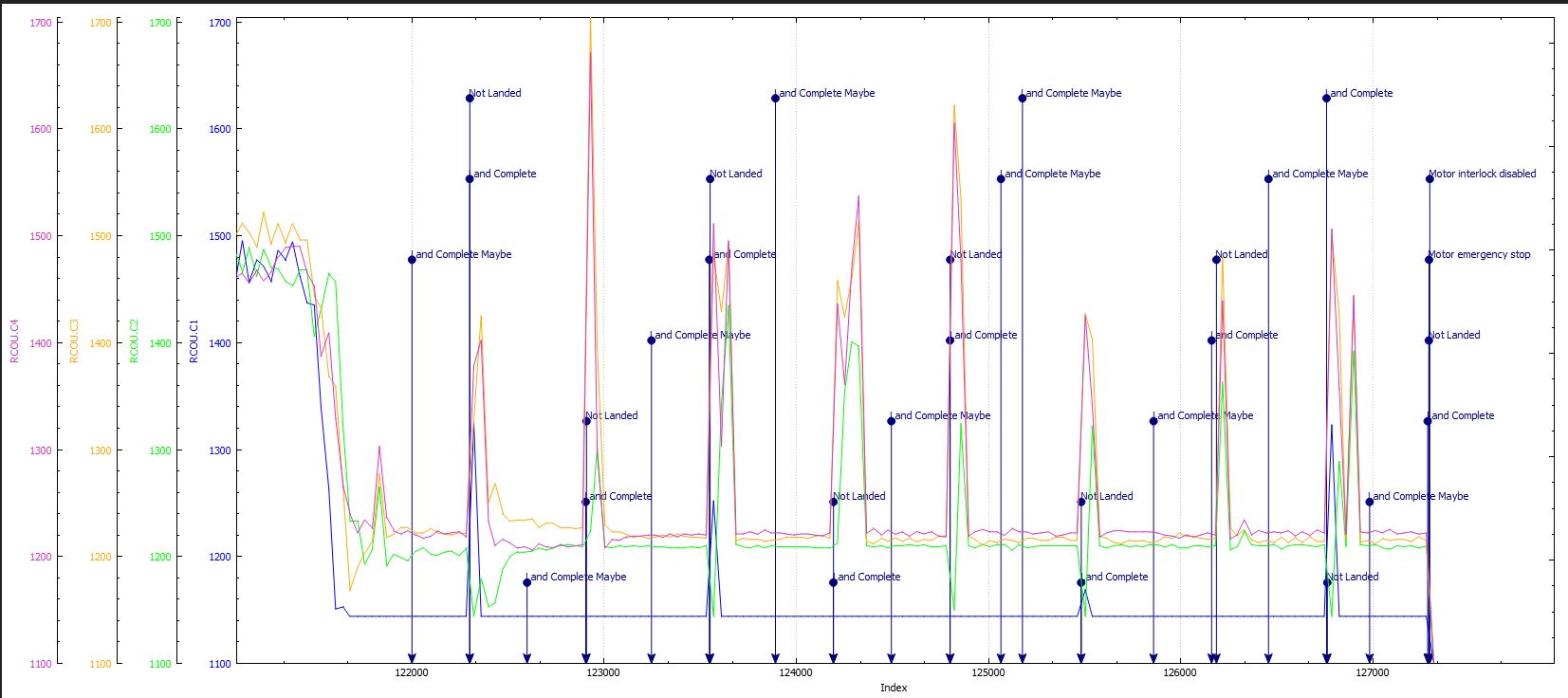
In every flight i have strange behavior after landing, copter not disarming and periodically pulsing motors. I can disarm it only using emergency stop. Log shows rapidly changing states from “Land complete” to “Not landed”.
Parameter PILOT_THR_BHV should be 4 or 6. If you have this set for anything else, it won’t disarm on landing detection, and will instead wait for the disarm timer.
As i can see on the full paramater page PILOT_THR_BHV has settings 1 to 4 and not 5&6 included.
Also states that Sprung return radios should be set to 1. Could someone say what 5 and 6 are?
Because while virtual testing with 4 i found that motors shut down long before. My virtual test was to arm with no props, take off (while lifting the quad to 2m) and virtually land, while lowering height when lowering throttle and found that my props would shut down long before “landing”