I have an auto mission with waypoint height set at 70m
Mission completes smoothly from auto take-off to auto-landing, just one weird observation when audo landing:
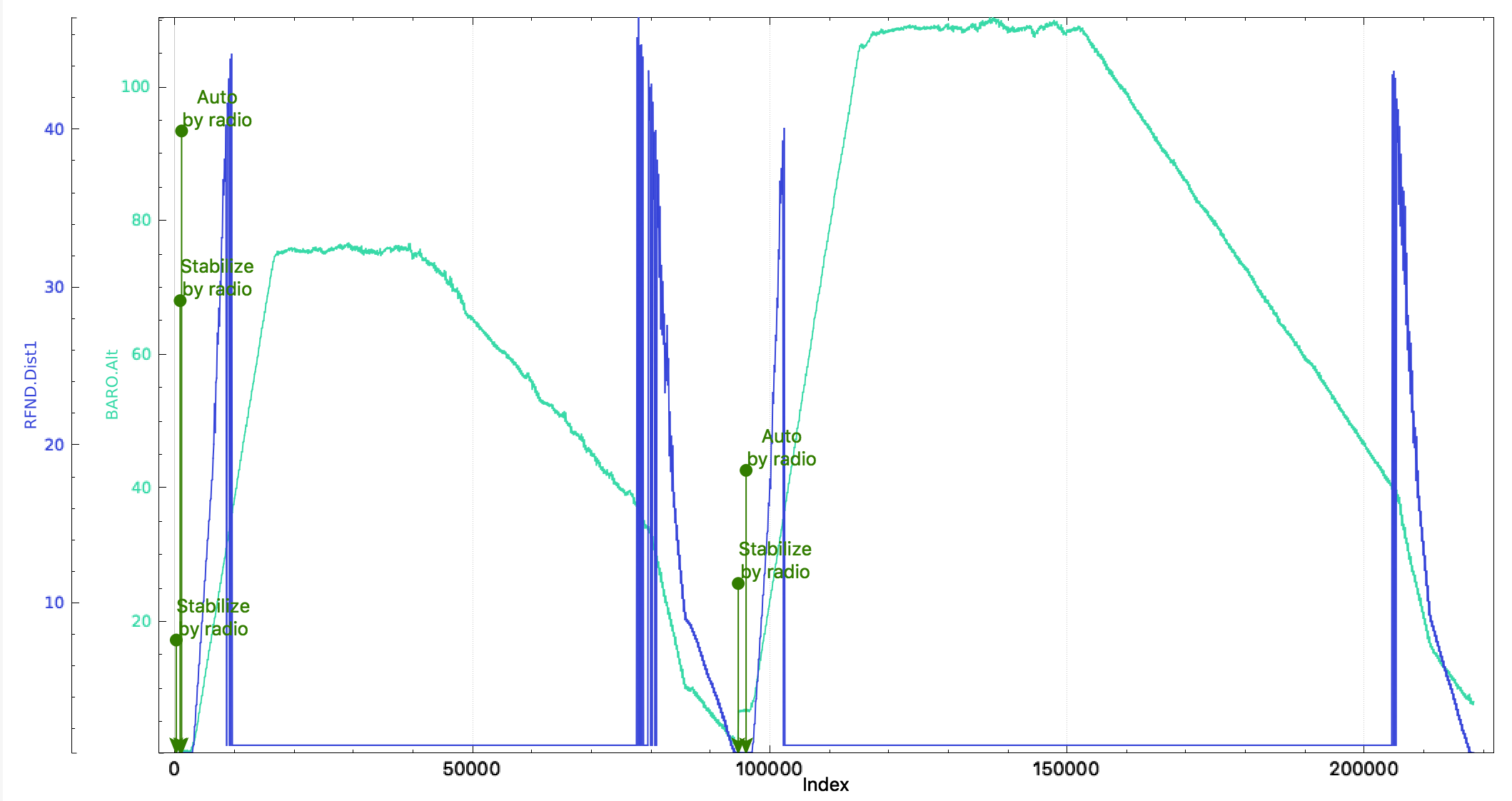
70m -> ~30m : the copter descends at LAND_SPEED (50cm/s, slow)
~30 -> ~10m: the copter descends at LAND_SPEED_HIGH (150cm/s, fast)
10m -> 0m : the copter descends at LAND_SPEED (50cm/s, slow)
WPNAV_SPEED_DN is also set to 150cm/s
For the love of me I dont understand why the very first part of the descent is at the slow speed instead of obeying LAND_SPEED_HIGH and where this consistent number of ~30m comes from.
FYI, I also notice the height reading of the rangefinder cuts out at approx 40m whereas it should be good to 100m or more. Not sure where that is coming from or if its related. Im flying over grass/trees only, no manmade structure.
GCS: QGroundControl
APM version: V3.5.2
Pixhawk 2
I have a lightware LW20 rangefinder but it is not selected in EK2_ALT_SOURCE
The graph you posted looks like it uses the fast speed all the way down to 10m. Can you upload the flight log?
As for the rangefinder, the effective range is very sensitive to the type of surface it’s bouncing off of. I use the LW20 and have found that, for example, black asphalt produces very poor range, while white concrete or IR reflective roofing material will afford a much greater range. I’ve seen its effective range be anywhere from 30m to 80m.
Hm, I see that you have WPNAV_RFND_USE turned on. Your other settings look good, and the descent speed increases at the same time your rangefinder starts getting a reading, so I wonder if the fast land speed is waiting for a rangefinder reading to kick in. Try setting WPNAV_RFND_USE = 0 and see if that changes the behavior. This may explain the seemingly arbitrary 40 meter speed change.