Hello, I am asking for help to understand why several times on different copters a situation occurred that no landing was detected.
Сan you specify the exact reason for the absence of event “Land complete maybe” both in the Land mode and in the attempt to disarm with sticks.
Here is a link to the log files (sorry, coordinates are hidden).
This problem was observed on several units.
It was possible to detect a problem in the calibration of the level.
AHRS_TRIM_Y was too high (0.1rad). After touching the ground, there are discrepancies between the expected and actual angles.
After setting these parameters to the default, we got a positive result. But the question still remains why at zero throttle, acceleration and velocity to 1 ground was not detected. Please explain to me. Either I didn’t interpret the land detection conditions correctly when reading the code, or it’s a bug. Thank you.
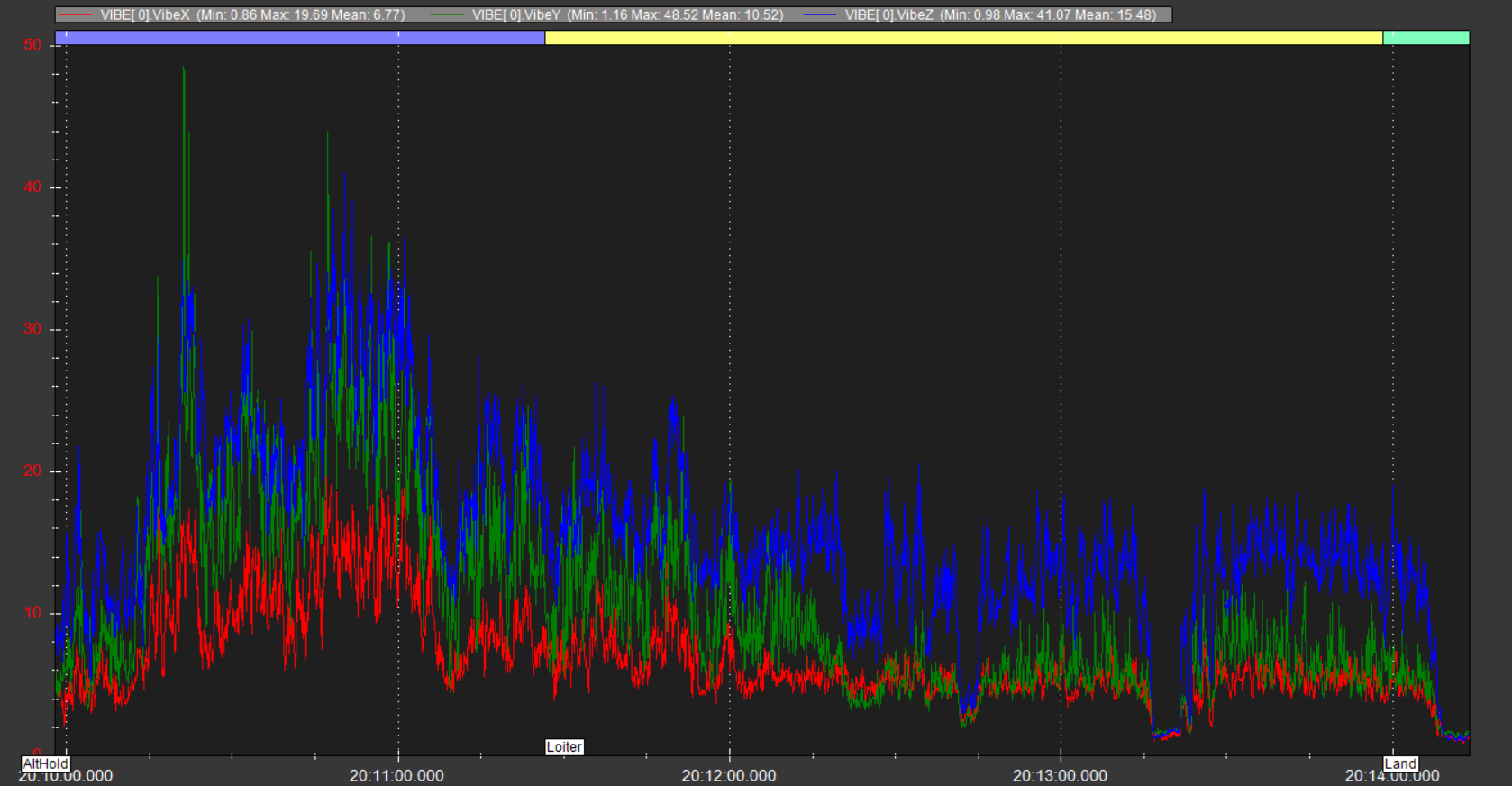
I believe your landing detection issue will be vibrations.
Tuning in general can also be improved by first fixing vibrations.
In this graph everything over about 20 usually gives trouble, 30 is bad.
Around 15 is a grey area of “this can go either way” and down around 10 and below is good.