I am having trouble disarming my quadcopter after landing because i think the land_detector.cpp is having difficulties detecting the landing.
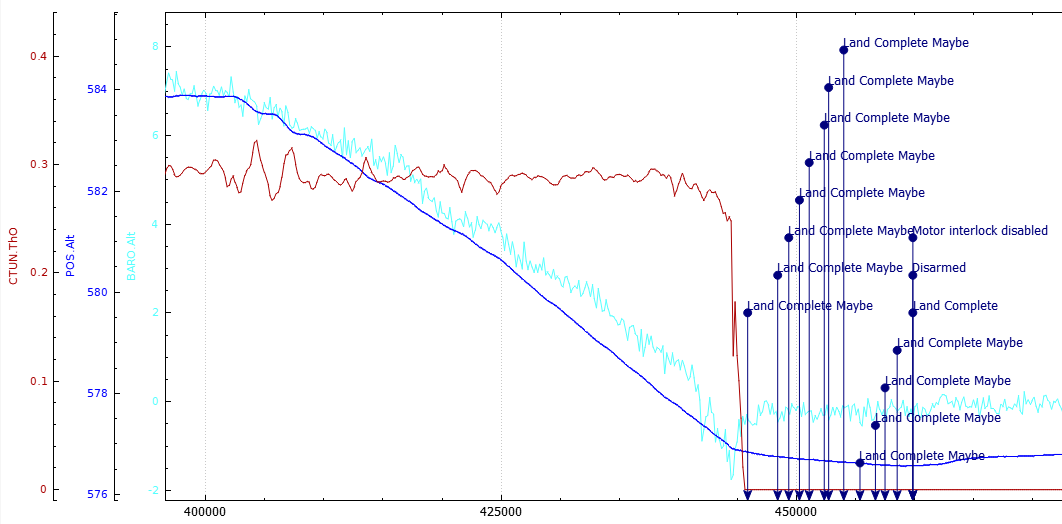
When landing the drone, I touchdown and from then on I keep the throttle in the lowest position. The land_detector don’t recognize the landing, spits out plenty of “Land_Complete_Maybe” flags, and after some seconds I am forced to disarm the quadcopter manually from MP.
Examples of the event are presented below. I have also attached the full flight logs at the end of the post.

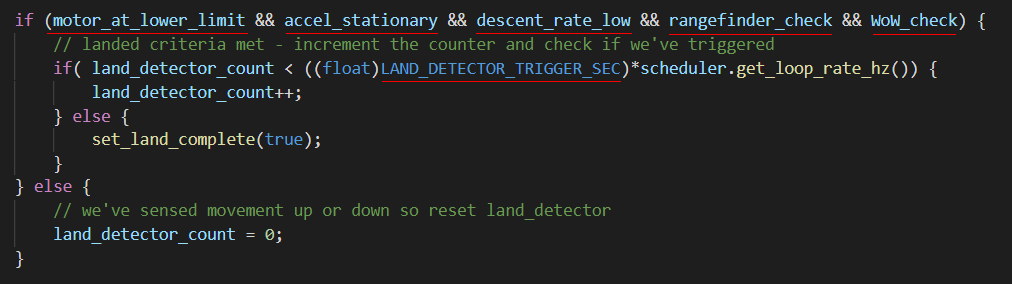
Form what i learned looking into the code, the land_detector has to satisfy five conditions for at least “LAND_DETECTOR_TRIGGER_SEC” that equals to 1s. These five conditions are:
-
motor_at_lower_limit (Check that the average throttle output is near minimum, less than 12.5% hover throttle):
As far as what I can see in the logs this is true from the moment of touchdown. -
accel_stationary (Check that the airframe is not accelerating):
From the moment of touchdown accels remain well below LAND_CHECK_ACCEL_MOVING that equal to 3. -
descent_rate_low (Check that vertical speed is within 1m/s of zero):
The descent rate is lower than 1m/s from even before the touchdown. -
rangefinder_check (if we have a healthy rangefinder only allow landing detection below 2 meters):
Sensor not present in this craft. -
WoW_check (Checks Weight on Wheels sensor):
Sensor not present in this craft.
So far, I feel very insecure every time I try to land the drone. I always end up needing to force the disarm from MP with one hand while holding the controller with the throttle at minimum with the other hand. This is a bit scary as it is a very large quadcopter with 32" propellers.
I will really appreciate if someone could take a look at the logs and give me some feedback or some ideas on what could be happening here.
Some drone details:
• Propellers: 32"
• Total weight: 17kg
• FC: Cube Orange
• AC version: ArduCopter V4.0.7
Flight LOGs: https://drive.google.com/drive/folders/1egirSFLKakzAzS6t6_QLrzkH3q5sqCAf?usp=sharing