Hi all,
I would like to make sure that my understanding is correct about the above paraments. Particularly what it propagates as a fallback. Finally the issue I see it creating more often than not.
My understanding, from the description, is that when using a rangefinder and say there was a long flight and hence some barometers drift. If on the landing approach, the recalculated glide slope based the lidar altitude is compared to the original one, which was based on the barometric altitude. And the difference is greater than angle X (as set in parameters), then the landing is aborted and redone.
So far so good. And I think very clear explanation too on the wiki. Plus it makes a lot of sense. What is unclear for me is what exactly happened on the 2nd try. It says in the wiki that the barometric altitude offset is readjusted. I am guessing, that it is readjusted to the lidar altitude. Correct? That would again only make sense. The landing at initiated once again with the new values, which in turn would make for a better/safer approach.
My question is, at what stage/positions/coordinate is the rangefinder altitude used to offset the barometer exactly? This, as it turns out, is very critical as I have seen from experience.
Here is the deal and this is what I have personly experienced multiple times. Many times the landing area is not entirely even. Maybe even at the designated touchdown point, but might have an up or down elevation on the approach. We are talking about commercial use, so no manicures landing field. And the landing is setup with wind direction factored in.
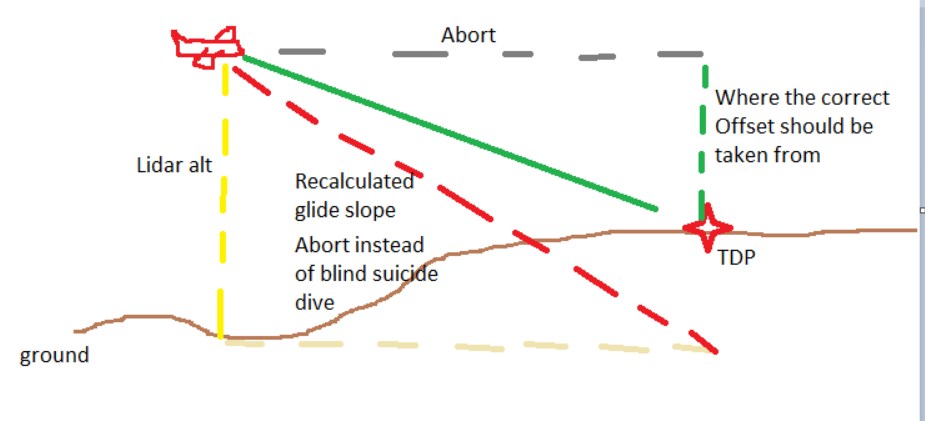
Looking at the picture attached. If the above function registers and corrects the offset based on readings from the lidar at a point that says 30m before the touchdown point (TDP) then the second attempt will end in a serious nosedive crash. I have experienced this multiple times. This is why I would like to know how/where the offset is taken from exactly.
My recommendation is, and I think this is what would make the most sense for all situations is to take and save the reading (and correction) from ass close to the TDP as possible, best would be to take it from the right when the plane is above the TDP exactly. That is the AGL that matters anyway, in regards to the landing.
I mean, what I would think best is on such an abort, not to climb but rather just to level off, but maintain exactly heading to the TDP, then mark the AGL there, correct bar with that, only climb after this. Turn around and come in for the second landing. Ignore lidar this (2nd) time, and only use barometer.
I have a feeling this is not what is going on now and this makes the lidar use almost more dangerous than not using it. I hope you see why.
Please anyone with thoughts, chip in. Also, someone with more understands than I, that can confirm if my assessment of what is happening currently: offset being corrected with data that is received way before the TDP. That if this is correct. Can you see any down side to the recommendation?
