First one is T-Drone M1200 RTF system. It has Cube autopilot. The one in the link below. It flies very well.
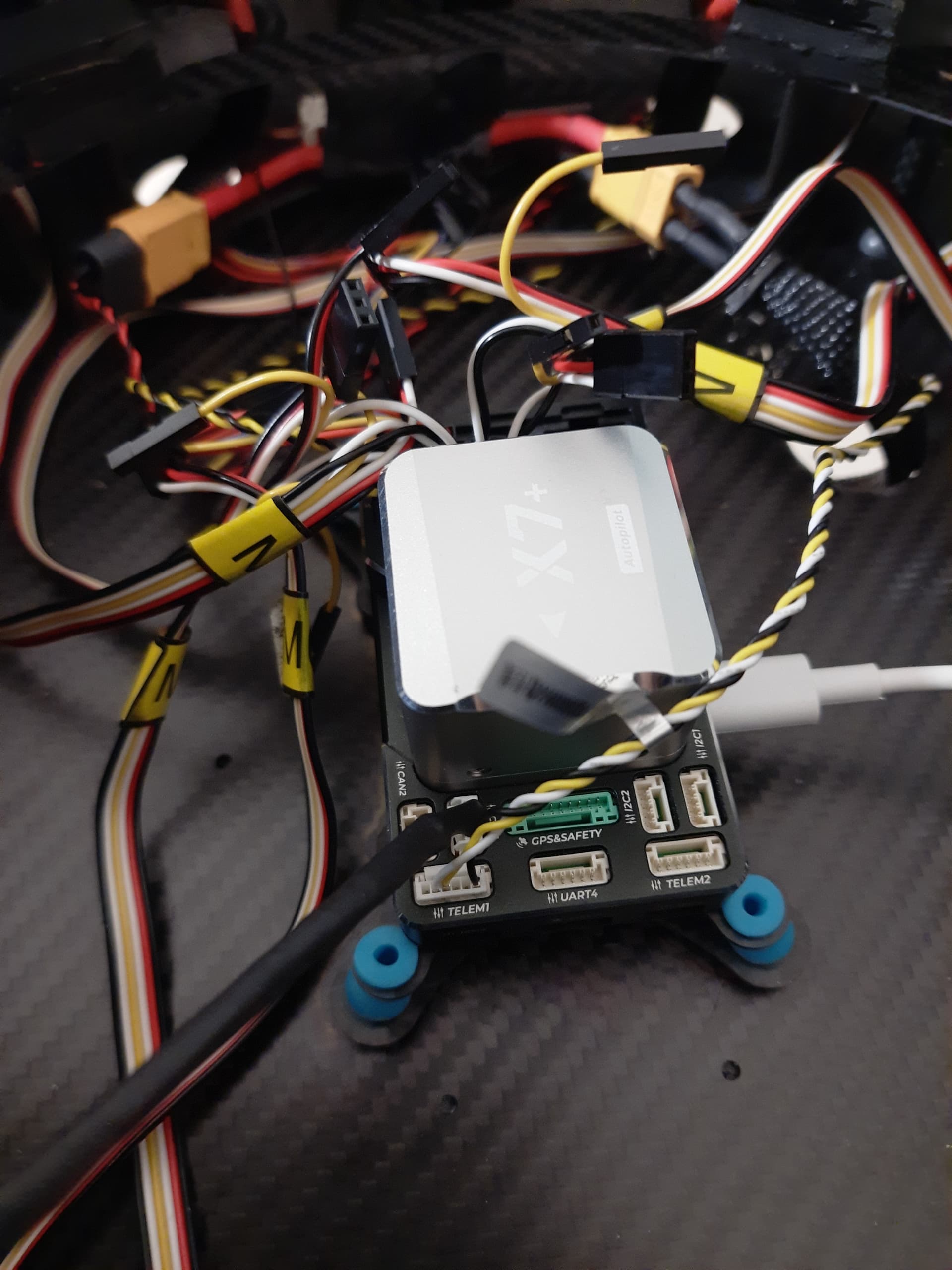
The second one is a custom made drone with T-Motor P80III KV120 and Alpha 80A ESC. It has CUAV X7+ autopilot. I have applied the following steps to improve the overall performance.
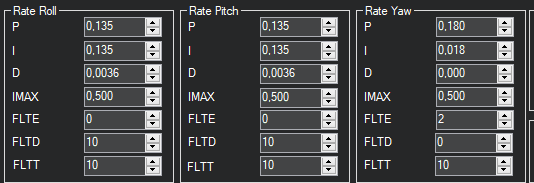
Set the tuning parameters selecting 30 inch props. The filter params are updated as follows.
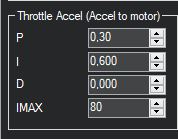
Hover thrust is around 0.15 since the drone is too powerful. To account for this effect I have reduced the throttle gains as follows. Doing this really improved motor response.
Added a basic vibration damper which also improved the performance.
I had some test flights and noticed that there is a 100 ms delay between the attitude commands and response. The log is below.
I checked the log file of RTF M1200 drone which has very good performance. I seen that there is almost no delay between the attitude commands and response. The log is below.
I am thinking that there might be a filter that cause this delay. Do you guys have any suggestions to resolve this delay?
Also I would appriciate if you have any recommendations to improve the performance of this overpowered drone system. The overall gains I used is as follows.
I didnt see much lag in that log. Your vibrations are showing extremely low, which is good, but makes me wonder if the flight controller has too much antivibration damping, too soft.
Maybe it is related to logging freq. thanks for reminding that.
The anti-vibration is as follows. Is there any concern regarding too much antivibration damping ? I assume that reducing vibration is always helpful. @xfacta What do you mean by too soft?
An X7 has internal damping and usually does not need that cheap antivibration mount.
I say “cheap” because whoever makes those cant even be bothered to angle the corner tabs so the balls are aligned instead of stressed.
If you do need one, these 3D printed versions are better - there’s a few like this that could easily be resized if needed.
And this sort specifically set up for the Cube but would likely suit you carrier too.
You would only need any of these if you’ve got an internal combustion motor/generator on board or something causing excessive vibrations.