This morning, the weather is relatively cool, I tested the L1 navigation mode again according to the settings recommended by @bnsgeyer . The following video is the whole process, followed by the logs file, I think it is not ideal!
Why did you decide to put NAVL1_DAMPING to 0.6? I don’t know if I would go much lower than 0.75. You’ll end up with many overshoots when attempting to capture a course. Why did you choose to use NAVL1_TURN_SF of 2.0. really you should not have to go more than 1.2-1.3 on this parameter in order for it to keep it from coming out of the turn with a significant crab. I think your NAVL1_PERIOD was probably a good number.
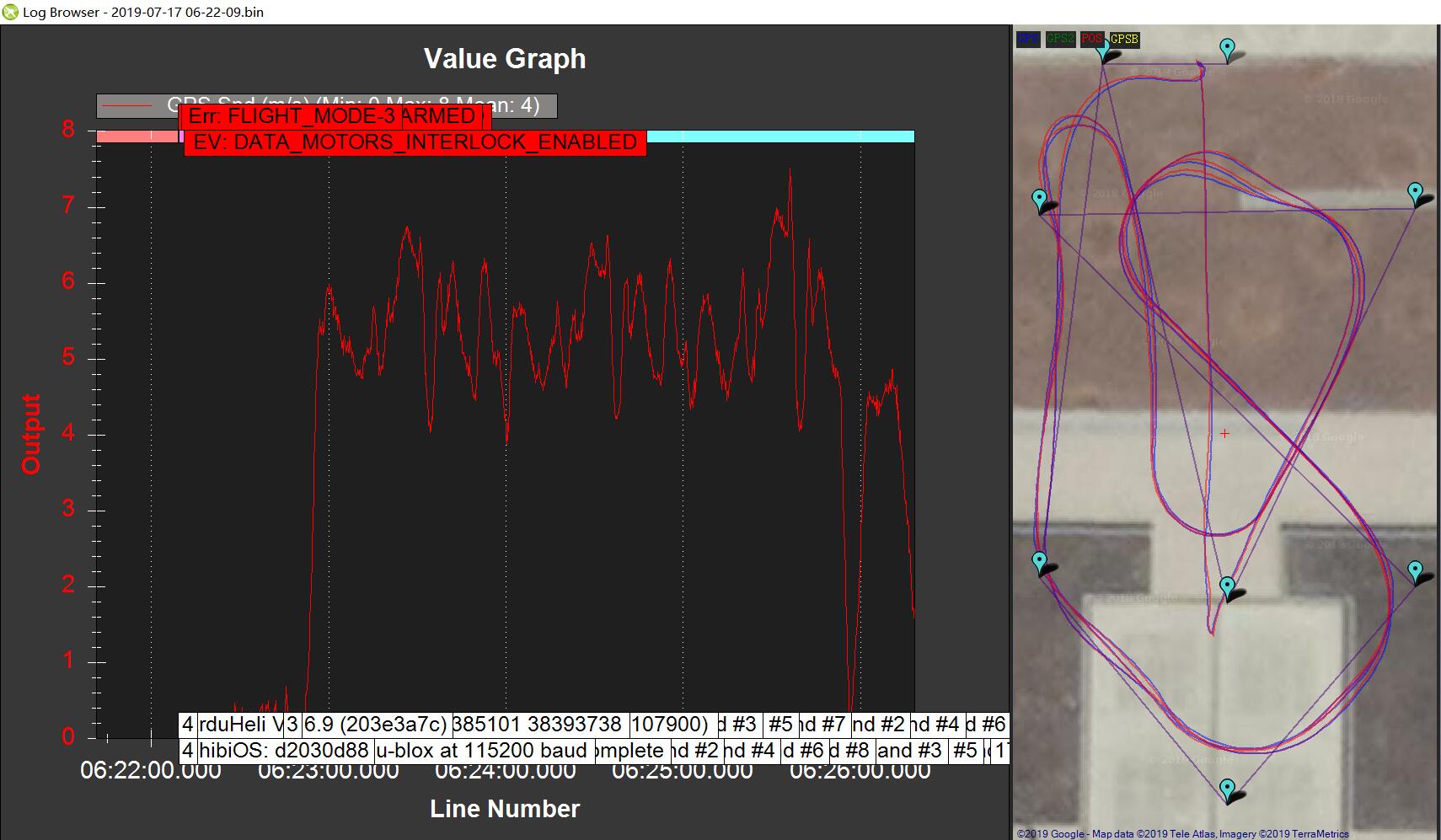
Also was the speed you were flying 5 m/s (this was the WPNAV_SPEED) or did your waypoint plan increase the speed. If it did increase it, what was your speed for the route?
Sorry it is not going well for you. We are all learning how to use L1 nav with heli’s
You are welcome!I still want to be grateful to the continuous efforts of several developers to continuously improve the traditional helicopter firmware and add new features.I also did not fully understand the role of the L1 navigation mode related parameters, but also in the exploration to understand the role of various parameters, thank @bnsgeyer for helping analyze the log, I will continue to adjust and continue to submit test reports
Thanks @bnsgeyer @ChrisOlson , cheers!
My WPNAV_SPEED is indeed 5m/s, the mission editor has not increased the flight speed, this morning is a bit windy, so the flight speed in the log is floating!
What I want to ask is, if the point-to-point distance is too close in the automatic task editing, will it result in inaccurate collection of the waypoint location?

I downloaded the stable release firmware listed in this thread for my FMUv3 (ChibiOS) but cannot find the L1 parameters?
The 3.6.9 firmware has them, but would really like to use the stable version. Am I missing something?
You need to download the custom build linked in Chris’ post
I did download the stable release from Chris Olson’s releases here: https://github.com/ChristopherOlson/ardupilot/releases
He said he got L1 into the 3.6.7 stable release but I’m not seeing the L1 parameters
No, 3.6.7 does not have L1 navigation, try 3.6.9
the L1 navigation still haven’t merge into stable version?
Unfortunately, L1 will never be merged into 3.6 stable. they are nearing final release of 3.6 and getting ready to move to development of 4.0. @ChrisOlson was kind enough to provide binaries of 3.6 with L1 based on the testing that we conducted after developing the L1 capability in Copter. I hope to have L1 merged with master (4.0-dev) and come out with the first stable release of 4.0 however that is a lot of work to move it from 3.6 to master and rework the code to make it acceptable for merging into master. We will see. I am pretty busy at the moment trying to make sure all our ducks are in a row once the first release of 4.0 comes out.
The ArduHeli 3.6.10 build is now available. There is no functional change from 3.6.9 for helicopters. This is a rebase on Copter 3.6.10 to have the latest Copter stable with all the new helicopter features, including L1 Navigation, four-servo swashplate support, rotor speed governor, etc., none of which in latest Copter 3.6. But users can enjoy flying these features on the stable Copter code instead of master.
1 Like
All Users, Please remember that L1 Nav is a new capability for tradheli. Although Chris and I have tested it and feel it is stable for the community to use. You should use it with caution. The L1 Nav will NOT protect you from over stressing your vehicle. If you are flying at speeds that are using most of your available power and L1 Nav requests a 60 deg sustained bank angle, the helicopter will certainly descend. Please be cautious and know the performance limits of your aircraft. I plan to have future upgrades limit speed, bank angle or both based on available collective. For now though, you need to use your best judgement.
@ChrisOlson Thanks for the updated version!!
1 Like
same way to compile locally, right ?
good work… 
Was there any plans to implement this?. I for one, abandoned L1 after seeing it crabbing and realizing it was a feature.
Crabbing is the most efficient way for an aircraft to handle a crosswind, vs flying in a slip into the wind.
However, the crabbing is a problem on survey flights.
Bill , Chris , thank you guys for all efforts to make this happen! it will be very cool on scale Heli ! 
I am building large size AS350 and fitting the entire 600 with its FC in!
60 deg sustained bank angle will be nice! I got the scale as350’s head with 3 700mm blades ’ just arrived two days ago! super cool!
Ozzy
Has this ever made it to master. Seems a really great way to make it more efficient , Have a planned 40km run to do and having the heli slow to a crawl at each waypoint is not ideal.
Hi Tom (@TomBarwick ),
The L1 Navigation never made it into master however there has been some work done to improve the turning in copters’ auto mode. In 4.4, a new parameter was introduced that can be used to minimize the speed lost in corners. Here is a post by Leonard that describes how to do this.
I have played with this new parameter and it does help. I have not fully explored it though.
If you have any questions, you can post here or you can post directly on that thread. Be sure to tag me if you post there so I am sure to see it.