This is a good point too. L1 will not work with WP radius set to 2 meters or 5 meters, or whatever people use for Copter. Depending on the speed, it may or may not use the full radius to make a smooth turn. I’ve been flying it with the WPNAV_RADIUS set to 2200 (22 meters), tuned for flying tight 180 deg turns on surveys at 20kts. At 10kts it will turn an almost square corner much closer to the waypoint with smaller radius. At 30kts it will fly a wider “teardrop” with more crosstrack error.
So this can be tuned for your normal cruise speed. But it will handle a wide range of speeds and still keep the bank angle in check with the turn rate (or turning period), and still maintain constant speed in the turn.
I found that the damping setting, lower values will cause more “teardrop” and crosstrack error on the next leg. Higher damping causes less “teardrop” and cross-track error. I had the damping at 1.3 at one point to get zero crosstrack error. But turned that down to 0.8 and found Stomp Factor and the associated pedal turn works actually better for 180 deg S&R turns.
Stomp Factor is one thing Plane L1 does not have. But pedal turning is a perfectly valid method of making tight turns with helicopters, within the airspeed limitations in the flight manual for pedal turns. And it works just as well in RC as it does in full-size manned.
This is a good video that depicts the dynamics of the S&R reversal using a pedal turn. A helicopter can literally turn on a dime using this method. ArduPilot is now capable of doing this with L1 on autopilot if you get it tuned right with Stomp Factor.
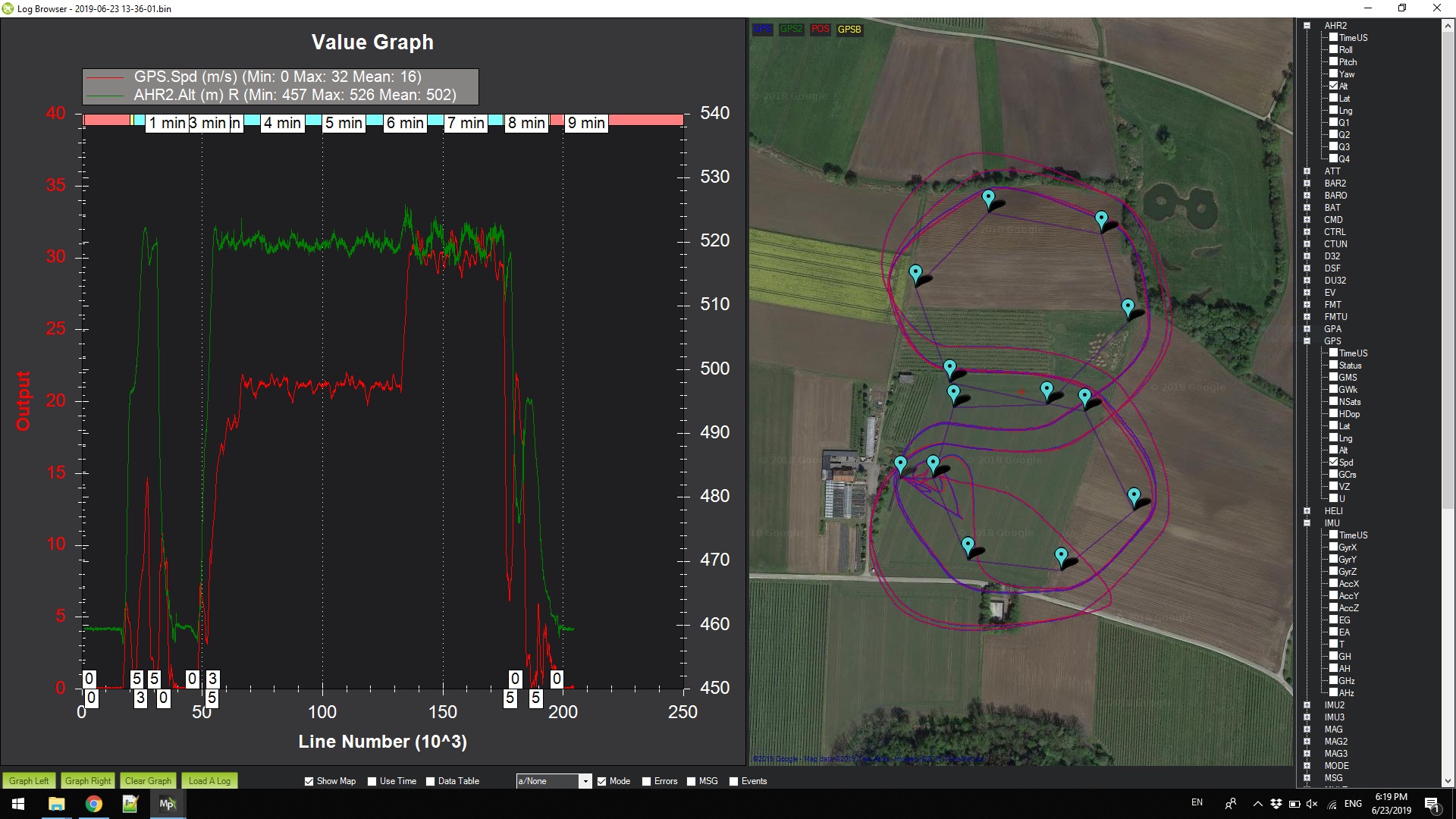
 spraying flight near Szomor, Hungary")