During these days, I was trying to better understand how ArduRover works in order to check the performance by reading the dataflash logs and improve the tuning of the system.
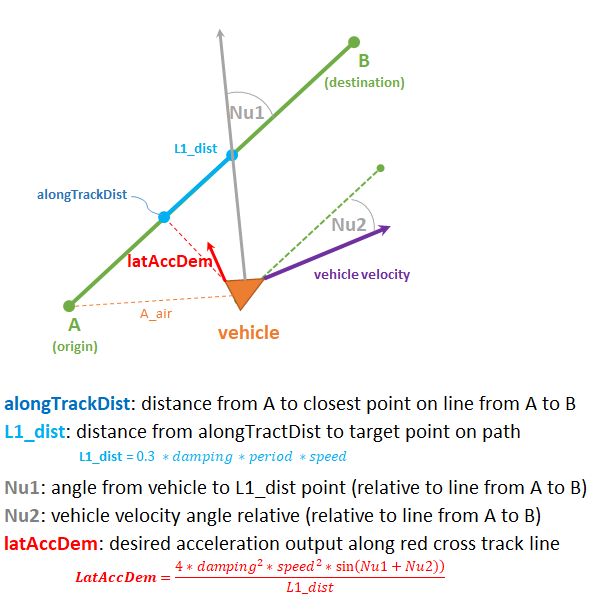
In particular, I had a look at the L1 Controller (Rover: L1 navigation overview — Dev documentation) for the trajectory control based on GPS waypoints.
I’m using Dual RTK GPS for heading estimation and this is a BIN log.
I would like to verify the data logs to see if the trajectory algorithm is working fine, may be by checking the error between the desired path and the current vehicle’s path or any other parameter.
If they exist, what are the parameters to check out the trajectory algorithm paramaters?