I am using ArduCopter-quad 3.4 on a Navio2 and Mission Planner.
I want to program a kill switch that I can use anytime to turn off the motors. I have a spare channel (ch6) and switch on my transmitter that I can dedicate for the function. Does ArduCopter 3.4 have the capability to support that?
Can you tell me why when I turn off my radio (on the bench without props), the motors slow down to a low throttle setting for about five seconds, then finally turn off? I have the throttle failsafe set for LAND.
I understand that doing bench testing is something everyone wants to do (and rightly so), but it is hard on the software to cope with it on every feature. For example, the software tries to figure out if you have taken off and when you land - if you have your copter sitting on your desk the software will probably not figure that out correctly.
To answer your question directly: are you sure it didn’t change to Land mode? A log is the only way to tell what is happening in your specific case, I have no idea what you did before turning off the radio.
I did some more tests and began to underatnd how to use the logs. I have included some excerpts.
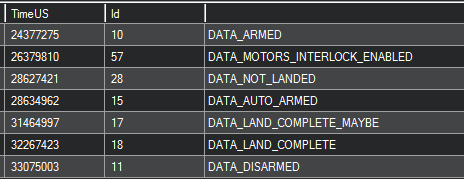
The first one shows a simple sequence were I armed the motors then immediately disarmed them. It appears that the machine still thinks it is flying and doesn’t turn off the motors until it thinks it is back on the ground?
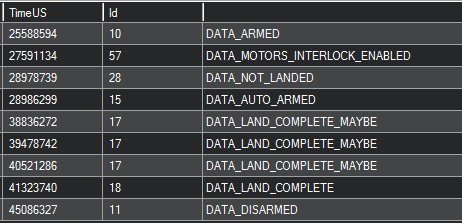
The second one shows a sequence were I armed, throttled up, and moved the propless quad around the room a bit before throttling down, setting the machine down and then disarming. Even though it was sitting still on the bench it still thought it was flying and didn’t shut down the motors until it thought it was on the ground about 10 seconds later.
Am I seeing this correctly?
Thanks again Francisco, Paul
This first excerpt shows that it may be waiting to be on the ground:
This second excerpt shows that it was waiting to be on the ground:
Yes, it is maybe a bit controversial, but you can only disarm in non-manual modes (so all modes except Acro and Stabilize) after the vehicle thinks it is landed.
Like I said, doing bench testing can confuse the algorithms in the software as not everything works as expected - for example, you manually moving the quad around will likely make movements (and consequently changes in gyros and accelerometers) that wouldn’t happen in a real flight.